Chủ đề kalman filter matlab: Kalman Filter là một công cụ mạnh mẽ trong xử lý tín hiệu và dự báo. Bài viết này sẽ giúp bạn hiểu rõ cách triển khai Kalman Filter trong MATLAB, từ cơ bản đến nâng cao. Hãy khám phá cách sử dụng Kalman Filter để giải quyết các bài toán thực tế trong nhiều lĩnh vực, từ kỹ thuật cho đến tài chính.
Mục lục
- 1. Giới thiệu về Kalman Filter trong Matlab
- 2. Ứng dụng của Kalman Filter trong điều hướng GPS
- 3. Cấu trúc thuật toán Kalman Filter trong Matlab
- 4. Ưu điểm của việc sử dụng Kalman Filter trong Matlab
- 5. Kết luận
- 2. Ứng dụng của Kalman Filter trong điều hướng GPS
- 3. Cấu trúc thuật toán Kalman Filter trong Matlab
- 4. Ưu điểm của việc sử dụng Kalman Filter trong Matlab
- 5. Kết luận
- 3. Cấu trúc thuật toán Kalman Filter trong Matlab
- 4. Ưu điểm của việc sử dụng Kalman Filter trong Matlab
- 5. Kết luận
- 4. Ưu điểm của việc sử dụng Kalman Filter trong Matlab
- 5. Kết luận
- 5. Kết luận
- 1. Giới thiệu về Kalman Filter
- 2. Kalman Filter trong MATLAB
- 3. Cài đặt Kalman Filter trong MATLAB
- 4. Kalman Filter Mở Rộng (Extended Kalman Filter)
- 5. Kalman Filter Phi Tuyến (Nonlinear Kalman Filter)
- 6. Kalman Filter Phân Tán (Decentralized Kalman Filter)
- 7. Kết Luận và Hướng Phát Triển
1. Giới thiệu về Kalman Filter trong Matlab
Kalman Filter là một thuật toán mạnh mẽ dùng để xử lý tín hiệu và lọc nhiễu trong các hệ thống điều khiển và cảm biến. Thuật toán này thường được sử dụng trong các ứng dụng như điều hướng GPS, hệ thống định vị quán tính (INS) và nhiều lĩnh vực khác như robot và nhận diện mẫu. Matlab là công cụ phổ biến để thực hiện Kalman Filter nhờ khả năng tính toán nhanh chóng và mô phỏng các hệ thống phức tạp.
.png)
2. Ứng dụng của Kalman Filter trong điều hướng GPS
Trong các hệ thống điều hướng GPS, Kalman Filter được dùng để ước lượng vị trí và vận tốc của thiết bị di động. Bằng cách sử dụng các mô hình toán học để mô phỏng động học của GPS và các cảm biến, Kalman Filter giúp tăng độ chính xác của việc đo đạc. Matlab cung cấp các công cụ để mô phỏng và kiểm thử hiệu quả của Kalman Filter trong thời gian thực.
Ví dụ về Kalman Filter trong Matlab
Trong Matlab, một ví dụ đơn giản về việc sử dụng Kalman Filter cho hệ thống điều hướng GPS có thể như sau:
- Tạo mô hình trạng thái \(\mathbf{x}(k)\) của hệ thống dựa trên phương trình động học
- Thiết lập các ma trận hệ thống \(\mathbf{A}\), ma trận đo \(\mathbf{H}\), ma trận nhiễu quá trình \(\mathbf{Q}\), và ma trận nhiễu đo \(\mathbf{R}\)
- Cập nhật trạng thái dựa trên thông tin đo lường mới với phương trình Kalman: \[ \hat{\mathbf{x}}(k|k) = \hat{\mathbf{x}}(k|k-1) + \mathbf{K}(k)\left( \mathbf{z}(k) - \mathbf{H} \hat{\mathbf{x}}(k|k-1) \right) \]
- Trong đó \(\mathbf{K}(k)\) là ma trận Kalman gain được tính bằng: \[ \mathbf{K}(k) = \mathbf{P}(k|k-1)\mathbf{H}^T \left( \mathbf{H}\mathbf{P}(k|k-1)\mathbf{H}^T + \mathbf{R} \right)^{-1} \]
3. Cấu trúc thuật toán Kalman Filter trong Matlab
Thuật toán Kalman Filter bao gồm hai bước chính:
- Bước dự đoán: Dự đoán trạng thái tiếp theo dựa trên mô hình động học: \[ \hat{\mathbf{x}}(k|k-1) = \mathbf{A} \hat{\mathbf{x}}(k-1|k-1) + \mathbf{B} \mathbf{u}(k-1) \] Ma trận hiệp phương sai dự đoán: \[ \mathbf{P}(k|k-1) = \mathbf{A} \mathbf{P}(k-1|k-1) \mathbf{A}^T + \mathbf{Q}
- Bước cập nhật: Cập nhật trạng thái sau khi nhận được thông tin đo mới: \[ \hat{\mathbf{x}}(k|k) = \hat{\mathbf{x}}(k|k-1) + \mathbf{K}(k)\left( \mathbf{z}(k) - \mathbf{H} \hat{\mathbf{x}}(k|k-1) \right) \] Cập nhật ma trận hiệp phương sai: \[ \mathbf{P}(k|k) = \left( \mathbf{I} - \mathbf{K}(k)\mathbf{H} \right)\mathbf{P}(k|k-1) \]

4. Ưu điểm của việc sử dụng Kalman Filter trong Matlab
- Dễ dàng thực hiện các mô phỏng phức tạp nhờ bộ công cụ mạnh mẽ của Matlab.
- Tốc độ tính toán cao, phù hợp với các ứng dụng thời gian thực.
- Matlab hỗ trợ nhiều gói phần mềm mở rộng, giúp tối ưu hóa hiệu suất của Kalman Filter.

5. Kết luận
Kalman Filter là công cụ quan trọng trong xử lý tín hiệu và điều khiển tự động, và việc sử dụng Matlab để thực hiện Kalman Filter giúp nâng cao độ chính xác và hiệu quả trong các hệ thống điều khiển phức tạp. Ứng dụng của nó trong điều hướng GPS và các hệ thống tương tự mang lại nhiều lợi ích, đặc biệt trong việc giảm thiểu sai số và nhiễu.

2. Ứng dụng của Kalman Filter trong điều hướng GPS
Trong các hệ thống điều hướng GPS, Kalman Filter được dùng để ước lượng vị trí và vận tốc của thiết bị di động. Bằng cách sử dụng các mô hình toán học để mô phỏng động học của GPS và các cảm biến, Kalman Filter giúp tăng độ chính xác của việc đo đạc. Matlab cung cấp các công cụ để mô phỏng và kiểm thử hiệu quả của Kalman Filter trong thời gian thực.
Ví dụ về Kalman Filter trong Matlab
Trong Matlab, một ví dụ đơn giản về việc sử dụng Kalman Filter cho hệ thống điều hướng GPS có thể như sau:
- Tạo mô hình trạng thái \(\mathbf{x}(k)\) của hệ thống dựa trên phương trình động học
- Thiết lập các ma trận hệ thống \(\mathbf{A}\), ma trận đo \(\mathbf{H}\), ma trận nhiễu quá trình \(\mathbf{Q}\), và ma trận nhiễu đo \(\mathbf{R}\)
- Cập nhật trạng thái dựa trên thông tin đo lường mới với phương trình Kalman: \[ \hat{\mathbf{x}}(k|k) = \hat{\mathbf{x}}(k|k-1) + \mathbf{K}(k)\left( \mathbf{z}(k) - \mathbf{H} \hat{\mathbf{x}}(k|k-1) \right) \]
- Trong đó \(\mathbf{K}(k)\) là ma trận Kalman gain được tính bằng: \[ \mathbf{K}(k) = \mathbf{P}(k|k-1)\mathbf{H}^T \left( \mathbf{H}\mathbf{P}(k|k-1)\mathbf{H}^T + \mathbf{R} \right)^{-1} \]
XEM THÊM:
3. Cấu trúc thuật toán Kalman Filter trong Matlab
Thuật toán Kalman Filter bao gồm hai bước chính:
- Bước dự đoán: Dự đoán trạng thái tiếp theo dựa trên mô hình động học: \[ \hat{\mathbf{x}}(k|k-1) = \mathbf{A} \hat{\mathbf{x}}(k-1|k-1) + \mathbf{B} \mathbf{u}(k-1) \] Ma trận hiệp phương sai dự đoán: \[ \mathbf{P}(k|k-1) = \mathbf{A} \mathbf{P}(k-1|k-1) \mathbf{A}^T + \mathbf{Q}
- Bước cập nhật: Cập nhật trạng thái sau khi nhận được thông tin đo mới: \[ \hat{\mathbf{x}}(k|k) = \hat{\mathbf{x}}(k|k-1) + \mathbf{K}(k)\left( \mathbf{z}(k) - \mathbf{H} \hat{\mathbf{x}}(k|k-1) \right) \] Cập nhật ma trận hiệp phương sai: \[ \mathbf{P}(k|k) = \left( \mathbf{I} - \mathbf{K}(k)\mathbf{H} \right)\mathbf{P}(k|k-1) \]

4. Ưu điểm của việc sử dụng Kalman Filter trong Matlab
- Dễ dàng thực hiện các mô phỏng phức tạp nhờ bộ công cụ mạnh mẽ của Matlab.
- Tốc độ tính toán cao, phù hợp với các ứng dụng thời gian thực.
- Matlab hỗ trợ nhiều gói phần mềm mở rộng, giúp tối ưu hóa hiệu suất của Kalman Filter.
5. Kết luận
Kalman Filter là công cụ quan trọng trong xử lý tín hiệu và điều khiển tự động, và việc sử dụng Matlab để thực hiện Kalman Filter giúp nâng cao độ chính xác và hiệu quả trong các hệ thống điều khiển phức tạp. Ứng dụng của nó trong điều hướng GPS và các hệ thống tương tự mang lại nhiều lợi ích, đặc biệt trong việc giảm thiểu sai số và nhiễu.
3. Cấu trúc thuật toán Kalman Filter trong Matlab
Thuật toán Kalman Filter bao gồm hai bước chính:
- Bước dự đoán: Dự đoán trạng thái tiếp theo dựa trên mô hình động học: \[ \hat{\mathbf{x}}(k|k-1) = \mathbf{A} \hat{\mathbf{x}}(k-1|k-1) + \mathbf{B} \mathbf{u}(k-1) \] Ma trận hiệp phương sai dự đoán: \[ \mathbf{P}(k|k-1) = \mathbf{A} \mathbf{P}(k-1|k-1) \mathbf{A}^T + \mathbf{Q}
- Bước cập nhật: Cập nhật trạng thái sau khi nhận được thông tin đo mới: \[ \hat{\mathbf{x}}(k|k) = \hat{\mathbf{x}}(k|k-1) + \mathbf{K}(k)\left( \mathbf{z}(k) - \mathbf{H} \hat{\mathbf{x}}(k|k-1) \right) \] Cập nhật ma trận hiệp phương sai: \[ \mathbf{P}(k|k) = \left( \mathbf{I} - \mathbf{K}(k)\mathbf{H} \right)\mathbf{P}(k|k-1) \]

4. Ưu điểm của việc sử dụng Kalman Filter trong Matlab
- Dễ dàng thực hiện các mô phỏng phức tạp nhờ bộ công cụ mạnh mẽ của Matlab.
- Tốc độ tính toán cao, phù hợp với các ứng dụng thời gian thực.
- Matlab hỗ trợ nhiều gói phần mềm mở rộng, giúp tối ưu hóa hiệu suất của Kalman Filter.
5. Kết luận
Kalman Filter là công cụ quan trọng trong xử lý tín hiệu và điều khiển tự động, và việc sử dụng Matlab để thực hiện Kalman Filter giúp nâng cao độ chính xác và hiệu quả trong các hệ thống điều khiển phức tạp. Ứng dụng của nó trong điều hướng GPS và các hệ thống tương tự mang lại nhiều lợi ích, đặc biệt trong việc giảm thiểu sai số và nhiễu.
4. Ưu điểm của việc sử dụng Kalman Filter trong Matlab
- Dễ dàng thực hiện các mô phỏng phức tạp nhờ bộ công cụ mạnh mẽ của Matlab.
- Tốc độ tính toán cao, phù hợp với các ứng dụng thời gian thực.
- Matlab hỗ trợ nhiều gói phần mềm mở rộng, giúp tối ưu hóa hiệu suất của Kalman Filter.

5. Kết luận
Kalman Filter là công cụ quan trọng trong xử lý tín hiệu và điều khiển tự động, và việc sử dụng Matlab để thực hiện Kalman Filter giúp nâng cao độ chính xác và hiệu quả trong các hệ thống điều khiển phức tạp. Ứng dụng của nó trong điều hướng GPS và các hệ thống tương tự mang lại nhiều lợi ích, đặc biệt trong việc giảm thiểu sai số và nhiễu.
5. Kết luận
Kalman Filter là công cụ quan trọng trong xử lý tín hiệu và điều khiển tự động, và việc sử dụng Matlab để thực hiện Kalman Filter giúp nâng cao độ chính xác và hiệu quả trong các hệ thống điều khiển phức tạp. Ứng dụng của nó trong điều hướng GPS và các hệ thống tương tự mang lại nhiều lợi ích, đặc biệt trong việc giảm thiểu sai số và nhiễu.
1. Giới thiệu về Kalman Filter
Kalman Filter là một thuật toán được phát triển bởi Rudolf E. Kalman vào năm 1960, sử dụng để ước lượng trạng thái của hệ thống động, đặc biệt trong các hệ thống tuyến tính. Thuật toán này cung cấp một phương pháp tối ưu trong việc xử lý dữ liệu nhiễu, đồng thời dự đoán trạng thái tương lai dựa trên dữ liệu đo lường hiện tại và quá khứ.
Trong toán học, Kalman Filter hoạt động dựa trên chuỗi các phương trình khác nhau, trong đó ước lượng trạng thái của hệ thống được cập nhật liên tục khi có dữ liệu mới. Công thức cơ bản của Kalman Filter có thể viết dưới dạng:
- \(x_k\): Trạng thái của hệ thống tại thời điểm \(k\)
- \(u_k\): Đầu vào điều khiển tại thời điểm \(k\)
- \(z_k\): Đo lường quan sát tại thời điểm \(k\)
- \(A\): Ma trận trạng thái
- \(B\): Ma trận đầu vào điều khiển
- \(H\): Ma trận đo lường
- \(w_k\), \(v_k\): Nhiễu quá trình và nhiễu đo lường
Kalman Filter có rất nhiều ứng dụng, từ điều khiển tự động, xử lý tín hiệu, dự báo tài chính cho đến các hệ thống dẫn đường và định vị trong không gian. MATLAB cung cấp các công cụ mạnh mẽ để thực hiện Kalman Filter một cách dễ dàng và nhanh chóng.
Bài viết tiếp theo sẽ hướng dẫn chi tiết cách triển khai Kalman Filter trong MATLAB, bao gồm cách sử dụng các hàm có sẵn và xây dựng thuật toán từ đầu.

2. Kalman Filter trong MATLAB
Kalman Filter là một thuật toán hữu ích trong việc dự đoán và ước lượng trạng thái của hệ thống động, và MATLAB là công cụ mạnh mẽ giúp thực hiện thuật toán này một cách dễ dàng. Trong MATLAB, Kalman Filter có thể được triển khai thông qua các hàm có sẵn hoặc bằng cách xây dựng từ đầu thông qua mã lệnh.
Để thực hiện Kalman Filter trong MATLAB, ta cần thực hiện các bước sau:
- Xác định mô hình hệ thống: Trước tiên, bạn cần xây dựng mô hình toán học cho hệ thống của mình, gồm các phương trình trạng thái và phương trình đo lường. Mô hình này thường được viết dưới dạng:
\[
x_k = A x_{k-1} + B u_k + w_k
\]
\[
z_k = H x_k + v_k
\]
- \(x_k\): Trạng thái của hệ thống tại thời điểm \(k\)
- \(u_k\): Đầu vào điều khiển
- \(z_k\): Đo lường quan sát
- \(A\), \(B\), \(H\): Các ma trận hệ thống
- \(w_k\), \(v_k\): Nhiễu quá trình và nhiễu đo lường
- Sử dụng các hàm Kalman có sẵn trong MATLAB: MATLAB cung cấp các hàm như
kalmanhoặcfilterđể thực hiện Kalman Filter. Bạn chỉ cần cung cấp các tham số như ma trận trạng thái, ma trận đo lường và các tham số nhiễu.- Ví dụ sử dụng hàm
kalmanđể thiết kế Kalman Filter cho một hệ thống:
Ma trận trạng thái (A) Ma trận đầu vào (B) Ma trận đo lường (H) \[A = [1 1; 0 1]\] \[B = [0.5; 1]\] \[H = [1 0]\] - Ví dụ sử dụng hàm
- Chạy Kalman Filter: Sau khi đã định nghĩa các ma trận và sử dụng hàm
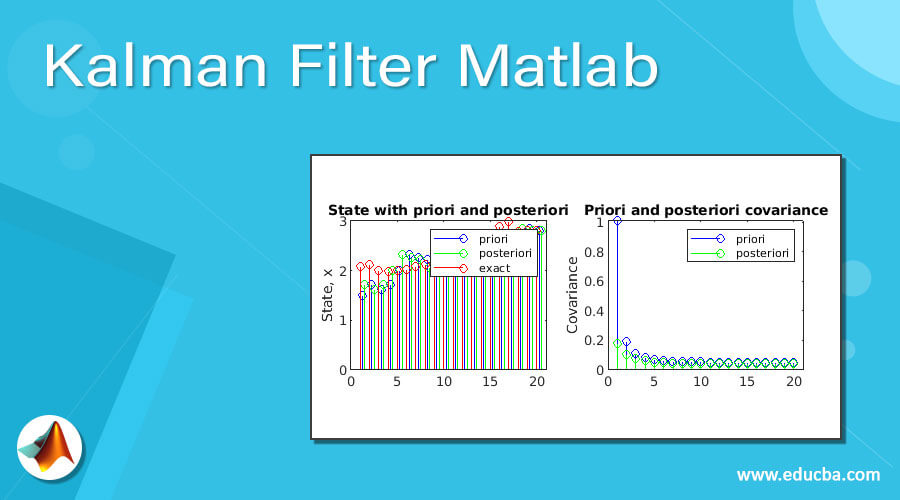
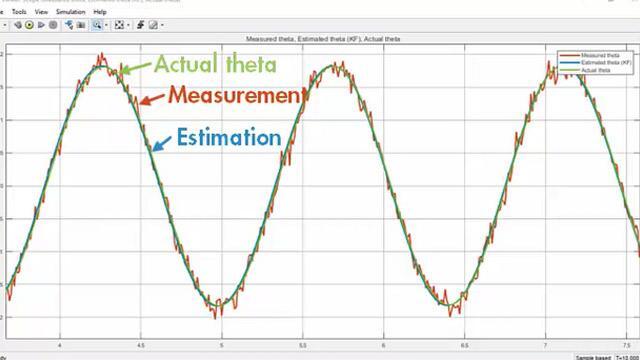
kalman, bạn có thể chạy Kalman Filter trên dữ liệu của mình và kiểm tra kết quả dự đoán. - Hiển thị kết quả: MATLAB cung cấp các công cụ trực quan hóa như
plotđể hiển thị kết quả dự đoán của Kalman Filter so với dữ liệu thực tế. Bạn có thể so sánh trực quan sự khác biệt giữa giá trị dự đoán và đo lường thực tế.
Kalman Filter trong MATLAB giúp giải quyết các vấn đề ước lượng trạng thái và giảm nhiễu dữ liệu một cách hiệu quả, phù hợp cho nhiều ứng dụng từ kỹ thuật đến kinh tế.
3. Cài đặt Kalman Filter trong MATLAB
Kalman Filter là một công cụ mạnh mẽ để dự đoán và ước lượng trạng thái của các hệ thống động. Trong MATLAB, việc cài đặt Kalman Filter yêu cầu sự hiểu biết về các bước cụ thể để xây dựng và áp dụng bộ lọc này. Dưới đây là các bước chi tiết để cài đặt Kalman Filter trong MATLAB:
- Chuẩn bị dữ liệu:
- Bạn cần chuẩn bị dữ liệu đầu vào cho hệ thống bao gồm các ma trận trạng thái và ma trận nhiễu:
- Khởi tạo trạng thái ban đầu \(x_0\) và ma trận nhiễu quá trình \(Q\) và nhiễu đo lường \(R\).
Ma trận trạng thái \(A\) Ma trận đo lường \(H\) \[ A = \begin{bmatrix} 1 & \Delta t \\ 0 & 1 \end{bmatrix} \] \[ H = \begin{bmatrix} 1 & 0 \end{bmatrix} \] - Xây dựng mô hình hệ thống:
Mô hình toán học của hệ thống phải được xây dựng dựa trên các phương trình trạng thái và phương trình đo lường. Ví dụ:
Phương trình trạng thái:
\[
x_k = A \cdot x_{k-1} + B \cdot u_k + w_k
\]
Phương trình đo lường:
\[
z_k = H \cdot x_k + v_k
\] - Khởi tạo các biến Kalman Filter:
Các biến cần được khởi tạo bao gồm:
- Trạng thái ban đầu \(x_0\)
- Ma trận hiệp phương sai ban đầu \(P_0\)
- Ma trận hệ thống \(A\), ma trận đo lường \(H\), ma trận nhiễu \(Q\), và ma trận nhiễu đo lường \(R\).
- Viết hàm Kalman Filter trong MATLAB:
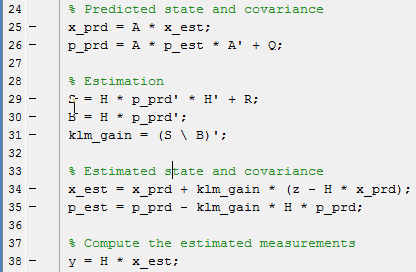
Sau khi có các biến cần thiết, bạn có thể triển khai Kalman Filter dưới dạng hàm trong MATLAB. Ví dụ, một phần mã của hàm Kalman có thể trông như sau:
\[
function [x_pred, P_pred] = kalman_filter(A, H, Q, R, x_prev, P_prev, z)
\]
Trong đó:
\[
x\_pred = A \cdot x\_prev
\]
\[
P\_pred = A \cdot P\_prev \cdot A' + Q
\]
\[
K = P\_pred \cdot H' \cdot (H \cdot P\_pred \cdot H' + R)^{-1}
\] - Áp dụng Kalman Filter:
Chạy Kalman Filter với dữ liệu thực tế và hiển thị kết quả. Ví dụ:
- Sử dụng hàm
plotđể hiển thị sự khác biệt giữa giá trị dự đoán và giá trị đo lường.
- Sử dụng hàm
4. Kalman Filter Mở Rộng (Extended Kalman Filter)
Kalman Filter Mở Rộng (EKF - Extended Kalman Filter) là phiên bản cải tiến của Kalman Filter tiêu chuẩn, được áp dụng cho các hệ thống phi tuyến. Thay vì chỉ áp dụng cho các mô hình tuyến tính, EKF mở rộng nguyên lý Kalman Filter để hoạt động trên các mô hình với trạng thái và quá trình đo lường phi tuyến, nhờ vào việc tuyến tính hóa xung quanh điểm ước lượng hiện tại.
- Khởi tạo hệ thống phi tuyến:
- Giả sử bạn có hệ thống phi tuyến với phương trình trạng thái: \[ x_k = f(x_{k-1}) + w_k \] và phương trình đo lường: \[ z_k = h(x_k) + v_k \] Trong đó \(f(x)\) và \(h(x)\) là các hàm phi tuyến, và \(w_k\), \(v_k\) lần lượt là nhiễu quá trình và nhiễu đo lường.
- Tuyến tính hóa bằng phương pháp Taylor:
Để áp dụng EKF, bạn cần tuyến tính hóa các hàm phi tuyến \(f(x)\) và \(h(x)\) bằng cách sử dụng khai triển Taylor bậc nhất xung quanh điểm dự đoán hiện tại. Ma trận Jacobian tương ứng được tính như sau:
- Ma trận Jacobian của hàm trạng thái \(f(x)\): \[ F_k = \frac{\partial f}{\partial x} \bigg|_{x = \hat{x}_{k-1}} \]
- Ma trận Jacobian của hàm đo lường \(h(x)\): \[ H_k = \frac{\partial h}{\partial x} \bigg|_{x = \hat{x}_k} \]
- Dự đoán và cập nhật trạng thái:
Các bước trong EKF tương tự như trong Kalman Filter tiêu chuẩn nhưng sử dụng ma trận Jacobian đã tính ở trên:
- Dự đoán trạng thái: \[ \hat{x}_k^- = f(\hat{x}_{k-1}) \]
- Dự đoán hiệp phương sai: \[ P_k^- = F_k P_{k-1} F_k^T + Q_k \]
- Cập nhật Kalman Gain: \[ K_k = P_k^- H_k^T (H_k P_k^- H_k^T + R_k)^{-1} \]
- Cập nhật trạng thái: \[ \hat{x}_k = \hat{x}_k^- + K_k (z_k - h(\hat{x}_k^-)) \]
- Cập nhật hiệp phương sai: \[ P_k = (I - K_k H_k) P_k^- \]
- Triển khai trong MATLAB:
Trong MATLAB, EKF được triển khai tương tự như Kalman Filter tiêu chuẩn, nhưng bạn cần bổ sung thêm các bước tuyến tính hóa hệ thống phi tuyến. Một đoạn mã cơ bản để triển khai EKF có thể trông như sau:
\[
function [x_pred, P_pred] = ekf(f, h, F_jacobian, H_jacobian, Q, R, x_prev, P_prev, z)
\]Trong đó \(f\) và \(h\) là các hàm phi tuyến, \(F_jacobian\) và \(H_jacobian\) là các ma trận Jacobian của chúng.
5. Kalman Filter Phi Tuyến (Nonlinear Kalman Filter)
Kalman Filter Phi Tuyến (Nonlinear Kalman Filter) là một mở rộng của bộ lọc Kalman truyền thống, được thiết kế để xử lý các hệ thống phi tuyến. Trong thực tế, nhiều ứng dụng trong kỹ thuật và khoa học gặp phải các tình huống phi tuyến, vì vậy việc áp dụng Kalman Filter Phi Tuyến là cần thiết.
5.1 Giới thiệu về Kalman Filter Phi Tuyến
Kalman Filter Phi Tuyến sử dụng các phương pháp xấp xỉ để ước lượng trạng thái của một hệ thống phi tuyến. Một trong những kỹ thuật phổ biến nhất được sử dụng là kỹ thuật xấp xỉ Taylor, trong đó hàm phi tuyến được mở rộng thành một chuỗi Taylor xung quanh điểm ước lượng gần nhất.
Các trạng thái và quan sát trong Kalman Filter Phi Tuyến thường được mô tả bằng các phương trình trạng thái sau:
Trong đó, \( f \) và \( h \) là các hàm phi tuyến mô tả động lực và đo lường, \( w_k \) và \( v_k \) là các nhiễu trắng Gaussian.
5.2 Thực hiện trong MATLAB
Để thực hiện Kalman Filter Phi Tuyến trong MATLAB, chúng ta có thể sử dụng các công cụ tích hợp sẵn. Các bước chính bao gồm:
- Định nghĩa các hàm trạng thái và quan sát phi tuyến.
- Khởi tạo các tham số cần thiết cho bộ lọc.
- Triển khai vòng lặp cập nhật bộ lọc tại mỗi bước thời gian.
Ví dụ mã MATLAB cơ bản cho Kalman Filter Phi Tuyến như sau:
% Khởi tạo tham số
x_k = initial_state; % trạng thái ban đầu
P_k = initial_covariance; % ma trận hiệp phương sai ban đầu
for k = 1:N
% Dự đoán
x_k_pred = f(x_k, u_k);
P_k_pred = F * P_k * F' + Q; % F là ma trận Jacobian
% Cập nhật
K = P_k_pred * H' / (H * P_k_pred * H' + R); % H là ma trận đo lường
x_k = x_k_pred + K * (z_k - h(x_k_pred));
P_k = (I - K * H) * P_k_pred; % I là ma trận đơn vị
end
Kalman Filter Phi Tuyến cung cấp một công cụ mạnh mẽ cho việc xử lý dữ liệu và ước lượng trạng thái trong các hệ thống phức tạp, giúp cải thiện độ chính xác của các ước lượng trong điều kiện phi tuyến.
6. Kalman Filter Phân Tán (Decentralized Kalman Filter)
Kalman Filter phân tán là một phương pháp mạnh mẽ trong việc ước lượng trạng thái của hệ thống động học khi thông tin được chia sẻ giữa nhiều nút hoặc cảm biến khác nhau. Phương pháp này giúp cải thiện tính chính xác và hiệu quả của việc ước lượng khi các cảm biến hoặc nguồn dữ liệu phân tán trong không gian.
1. Định Nghĩa
Kalman Filter phân tán cho phép các cảm biến thực hiện ước lượng trạng thái một cách độc lập, nhưng vẫn có khả năng hợp nhất thông tin từ các nguồn khác nhau để nâng cao độ chính xác.
2. Nguyên lý hoạt động
- Đo lường và Ước lượng: Mỗi cảm biến sẽ thu thập dữ liệu và thực hiện ước lượng trạng thái dựa trên dữ liệu mà nó có.
- Chia sẻ thông tin: Các cảm biến sẽ chia sẻ thông tin ước lượng với nhau, giúp cải thiện độ chính xác của ước lượng chung.
- Tính toán lại: Mỗi cảm biến sẽ điều chỉnh ước lượng của mình dựa trên thông tin nhận được từ các cảm biến khác.
3. Lợi ích của Kalman Filter phân tán
- Giảm tải cho các nút trung tâm vì mỗi cảm biến tự động xử lý dữ liệu của riêng mình.
- Cải thiện tính chính xác và độ tin cậy của ước lượng trạng thái thông qua việc kết hợp dữ liệu từ nhiều nguồn.
- Khả năng mở rộng tốt hơn khi số lượng cảm biến tăng lên.
4. Ứng dụng
Kalman Filter phân tán thường được áp dụng trong:
- Hệ thống theo dõi mục tiêu, như trong quân sự hoặc giao thông.
- Hệ thống điều khiển tự động và robot.
- Ứng dụng trong viễn thám và giám sát môi trường.
5. Ví dụ cài đặt bằng MATLAB
Dưới đây là một đoạn mã MATLAB mẫu cho Kalman Filter phân tán:
% Khởi tạo biến
x = zeros(n, m); % Trạng thái
P = eye(n); % Ma trận hiệp phương sai
% Vòng lặp qua các cảm biến
for i = 1:numSensors
% Đo lường từ cảm biến
z = getMeasurement(i);
% Cập nhật trạng thái
x = kalmanUpdate(x, P, z);
end
Đoạn mã trên thể hiện quy trình ước lượng trạng thái trong một mạng cảm biến phân tán, nơi mỗi cảm biến tự thực hiện ước lượng và cập nhật trạng thái của mình.
7. Kết Luận và Hướng Phát Triển
Kalman Filter là một công cụ rất mạnh mẽ trong lĩnh vực xử lý tín hiệu và ước lượng trạng thái, được ứng dụng rộng rãi trong nhiều lĩnh vực như robot, hệ thống giám sát, và phương tiện tự động. Nhờ vào khả năng ước lượng và giảm thiểu sai số, Kalman Filter giúp cải thiện độ chính xác trong việc theo dõi và dự đoán.
1. Kết luận
Nhìn chung, Kalman Filter đã chứng minh được hiệu quả của mình trong việc xử lý dữ liệu động và không chắc chắn. Một số điểm nổi bật về Kalman Filter bao gồm:
- Hiệu quả tính toán: Kalman Filter hoạt động nhanh chóng và có thể xử lý các tín hiệu thời gian thực.
- Khả năng ứng dụng đa dạng: Có thể áp dụng trong nhiều lĩnh vực khác nhau từ hàng không vũ trụ đến y tế.
- Độ chính xác cao: Cải thiện độ chính xác của các ước lượng nhờ vào việc tối ưu hóa thông tin từ các cảm biến.
2. Hướng phát triển
Trong tương lai, Kalman Filter có thể được phát triển hơn nữa với các hướng đi mới:
- Kết hợp với học máy: Kết hợp Kalman Filter với các phương pháp học máy để cải thiện khả năng dự đoán trong các hệ thống phức tạp.
- Mở rộng đến các mô hình không tuyến tính: Phát triển các biến thể như Kalman Filter không tuyến tính và Kalman Filter phân tán để xử lý các vấn đề khó khăn hơn.
- Cải thiện hiệu suất trong môi trường không chắc chắn: Nghiên cứu các thuật toán mới có thể giúp tăng cường hiệu suất của Kalman Filter trong các tình huống có độ nhiễu cao.
3. Tóm tắt
Kalman Filter là một công cụ không thể thiếu trong lĩnh vực ước lượng trạng thái và xử lý tín hiệu. Những phát triển trong tương lai sẽ mở rộng khả năng và ứng dụng của nó, giúp giải quyết các vấn đề phức tạp hơn trong thế giới thực.








 Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender
Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render
Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật
D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả
Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật
VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu
Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả
Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích
Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích "Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng
"Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử
Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp
Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành
Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng
Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024
Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024