Chủ đề transfer function matlab: Transfer function trong MATLAB là công cụ mạnh mẽ để mô hình hóa và phân tích hệ thống điều khiển. Bài viết này sẽ cung cấp hướng dẫn chi tiết từ cơ bản đến nâng cao, bao gồm các ví dụ thực tế và cách ứng dụng transfer function trong thiết kế hệ thống. Hãy khám phá để nắm vững kỹ thuật phân tích hệ thống ngay hôm nay!
Mục lục
- Chức Năng Truyền Đạt (Transfer Function) trong MATLAB
- 1. Giới thiệu về hàm truyền (Transfer Function)
- 2. Tạo và hiển thị hàm truyền trong MATLAB
- 3. Phân tích hệ thống sử dụng hàm truyền
- 4. Kết hợp các hàm truyền
- 5. Ứng dụng hàm truyền trong thiết kế điều khiển
- 6. Tính toán hàm truyền từ phương trình vi phân
- 7. Tổng kết
Chức Năng Truyền Đạt (Transfer Function) trong MATLAB
Chức năng truyền đạt (Transfer Function) trong MATLAB là một công cụ hữu ích trong kỹ thuật điều khiển và mô hình hóa hệ thống tuyến tính. Nó giúp đại diện các hệ thống điều khiển trong cả miền thời gian và miền tần số dưới dạng các phương trình toán học. Chức năng này được ứng dụng rộng rãi trong các lĩnh vực như kỹ thuật điện tử, cơ khí, tự động hóa và các ngành liên quan.
Khái niệm cơ bản
Chức năng truyền đạt là biểu diễn toán học của một hệ thống tuyến tính thời gian bất biến (LTI). Nó liên quan đầu vào và đầu ra của hệ thống trong miền Laplace, giúp đơn giản hóa việc phân tích và thiết kế hệ thống điều khiển.
Chức năng truyền đạt tổng quát có dạng:
\[
G(s) = \frac{N(s)}{D(s)}
\]
Trong đó:
- \(G(s)\): Chức năng truyền đạt.
- \(N(s)\): Đa thức tử số (Numerator Polynomial).
- \(D(s)\): Đa thức mẫu số (Denominator Polynomial).
Cách tạo Chức Năng Truyền Đạt trong MATLAB
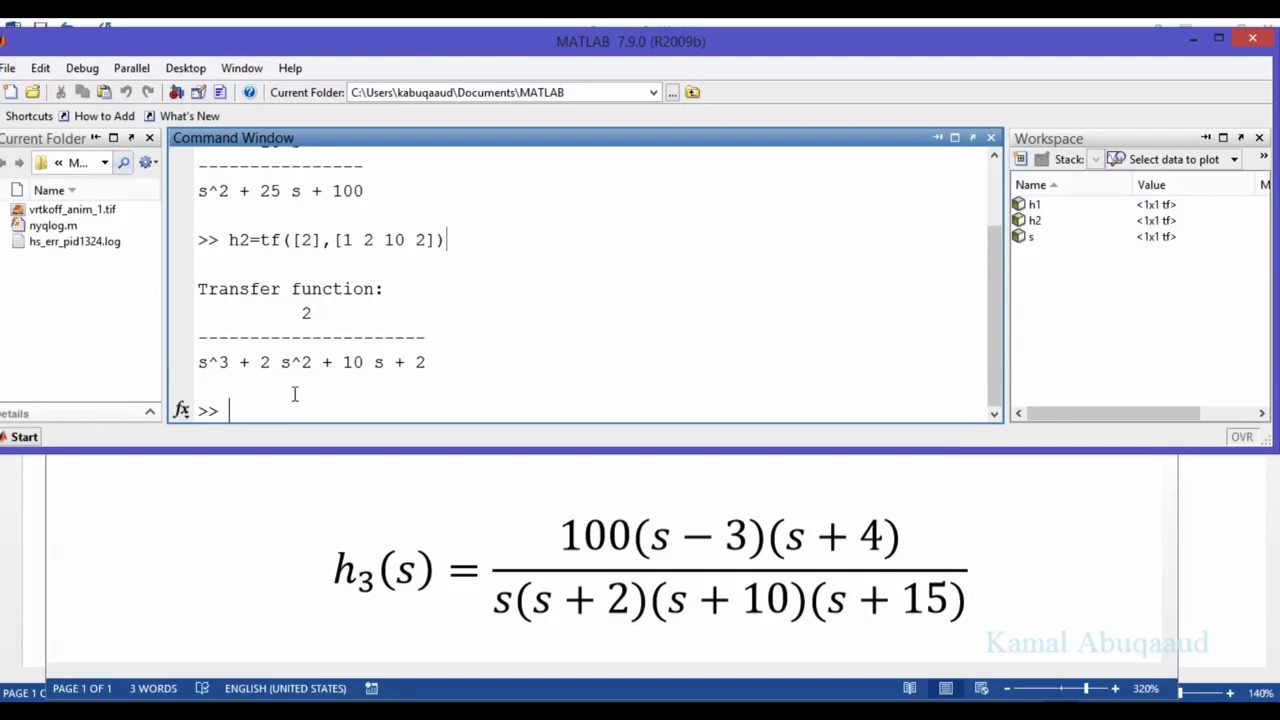
Trong MATLAB, ta có thể sử dụng lệnh tf để tạo một chức năng truyền đạt. Ví dụ:
num = [1 3];
den = [1 5 6];
sys = tf(num, den);
Lệnh trên tạo một chức năng truyền đạt:
\[
G(s) = \frac{s + 3}{s^2 + 5s + 6}
\]
Phân tích hệ thống với MATLAB
Sau khi tạo chức năng truyền đạt, MATLAB cung cấp nhiều công cụ mạnh mẽ để phân tích hệ thống:
step(sys): Vẽ đồ thị đáp ứng bước (step response) của hệ thống.bode(sys): Vẽ đồ thị Bode để phân tích trong miền tần số.pzmap(sys): Hiển thị đồ thị của các cực và không của hệ thống.
Một số ví dụ khác về Chức Năng Truyền Đạt
Ví dụ 1: Chức năng truyền đạt cho một mạch RLC
\[
G(s) = \frac{1}{L s^2 + R s + \frac{1}{C}}
\]
Trong MATLAB, bạn có thể mô hình hóa hệ thống này như sau:
L = 0.5;
R = 1;
C = 0.01;
num = 1;
den = [L, R, 1/C];
sys = tf(num, den);
Ví dụ 2: Chức năng truyền đạt của một hệ thống điều khiển động cơ DC:
\[
G(s) = \frac{K}{(Js + b)(Ls + R) + K^2}
\]
Trong đó:
- \(K\): Hằng số điện động (Motor constant).
- \(J\): Mô men quán tính của rotor.
- \(b\): Hằng số ma sát nhớt.
- \(L\): Độ tự cảm của mạch phần ứng.
- \(R\): Điện trở của mạch phần ứng.
Kết hợp nhiều chức năng truyền đạt
Bạn có thể kết hợp hai chức năng truyền đạt bằng cách sử dụng lệnh series hoặc parallel trong MATLAB.
Ví dụ kết hợp hai chức năng truyền đạt trong chuỗi:
sys1 = tf([1], [1 2]);
sys2 = tf([1], [1 3]);
sys_combined = series(sys1, sys2);
Kết hợp trong song song:
sys_combined = parallel(sys1, sys2);
Chuyển đổi giữa các dạng biểu diễn
MATLAB cho phép chuyển đổi giữa nhiều dạng biểu diễn khác nhau của hệ thống LTI, bao gồm:
ss(biểu diễn trạng thái).zpk(dạng không cực).tf(dạng đa thức).
Kết luận
Chức năng truyền đạt trong MATLAB là một công cụ mạnh mẽ giúp kỹ sư mô phỏng, phân tích và thiết kế các hệ thống điều khiển. Với các hàm phân tích như step, bode, và pzmap, MATLAB giúp đơn giản hóa quá trình nghiên cứu và phát triển hệ thống.
.png)
1. Giới thiệu về hàm truyền (Transfer Function)
Trong lý thuyết điều khiển và kỹ thuật hệ thống, hàm truyền (Transfer Function) là một công cụ toán học được sử dụng để mô tả mối quan hệ giữa đầu vào và đầu ra của một hệ thống tuyến tính. Được biểu diễn dưới dạng tỉ số của hai đa thức trong biến Laplace \(s\), hàm truyền cung cấp một cách thức dễ dàng để phân tích, mô phỏng và thiết kế các hệ thống điều khiển.
Hàm truyền được viết dưới dạng:
Trong đó:
- \(Y(s)\) là biểu thức Laplace của đầu ra.
- \(U(s)\) là biểu thức Laplace của đầu vào.
- \(a_0, a_1, \dots, a_m\) là các hệ số của đa thức tử số.
- \(b_0, b_1, \dots, b_n\) là các hệ số của đa thức mẫu số.
Hàm truyền rất quan trọng vì nó giúp mô hình hóa nhiều hệ thống vật lý khác nhau, bao gồm cả các hệ thống cơ học, điện tử, nhiệt học và âm học. Trong MATLAB, hàm truyền có thể được tạo ra dễ dàng bằng cách sử dụng lệnh tf(), với cú pháp:
Trong đó num và den lần lượt là các mảng chứa hệ số của tử số và mẫu số.
Bằng cách sử dụng hàm truyền, chúng ta có thể thực hiện các phân tích quan trọng như kiểm tra đáp ứng bậc thang (step response), đồ thị Bode (Bode plot), và nhiều công cụ phân tích khác trong MATLAB để tối ưu hóa hệ thống.
2. Tạo và hiển thị hàm truyền trong MATLAB
Hàm truyền (Transfer Function) là công cụ mạnh mẽ trong MATLAB giúp bạn phân tích và thiết kế hệ thống điều khiển. Trong MATLAB, có nhiều cách để tạo và hiển thị một hàm truyền thông qua các lệnh khác nhau như tf hoặc zpk.
Các bước tạo hàm truyền
- Định nghĩa hàm truyền theo hệ số đa thức:
Bạn có thể sử dụng lệnh
tfđể tạo hàm truyền từ các hệ số của tử số và mẫu số. Ví dụ:
Trong ví dụ này,num = [1 0]; den = [1 3 2]; G = tf(num, den);numđại diện cho hệ số của tử số, còndenlà hệ số của mẫu số. Hàm truyềnGsẽ được tạo ra dưới dạng \[ G(s) = \frac{1}{s^2 + 3s + 2} \]. - Định nghĩa hàm truyền bằng biểu thức:
Ngoài cách trên, bạn có thể định nghĩa hàm truyền trực tiếp bằng biến
s:
Phương pháp này cho phép bạn mô tả các hàm truyền phức tạp một cách trực quan hơn.s = tf('s'); G = s/(s^2 + 3*s + 2); - Hiển thị hàm truyền:
Để hiển thị hàm truyền vừa tạo, bạn chỉ cần gọi tên biến
Gtrong MATLAB, và kết quả sẽ hiển thị dưới dạng chuẩn:G - Vẽ đáp ứng của hàm truyền:
Bạn có thể dùng các lệnh như
bode,stepđể vẽ đáp ứng tần số hoặc đáp ứng bước của hệ thống:bode(G); step(G);

3. Phân tích hệ thống sử dụng hàm truyền
Hàm truyền (Transfer Function) là một công cụ quan trọng để phân tích hệ thống trong điều khiển tự động và các ngành liên quan. Bằng cách sử dụng hàm truyền, chúng ta có thể dễ dàng mô tả và phân tích hành vi của hệ thống trong miền tần số hoặc thời gian. Để phân tích hệ thống, MATLAB cung cấp nhiều công cụ hỗ trợ, giúp người dùng có thể thực hiện các bước sau:
- 1. Phân tích hệ thống bậc nhất: Một hệ thống bậc nhất có dạng hàm truyền đơn giản và thường được phân tích thông qua các thông số như thời gian đáp ứng, độ ổn định và sai số trạng thái ổn định.
- 2. Phân tích hệ thống bậc hai: Với hệ thống bậc hai, ta có thể dự đoán được các đặc điểm như thời gian ổn định (\(T_s\)), độ vượt (\(M_p\)), và tần số dao động dựa trên vị trí các cực của hàm truyền trong mặt phẳng Laplace.
- 3. Phân tích phản hồi bước (Step Response): Sử dụng lệnh
step()trong MATLAB để hiển thị phản hồi của hệ thống với một ngõ vào bước đơn vị. Thông qua đồ thị này, ta có thể kiểm tra thời gian đáp ứng, thời gian ổn định và hành vi tổng quát của hệ thống. - 4. Phân tích các cực và không (Poles and Zeros): Lệnh
pzmap()trong MATLAB giúp hiển thị vị trí của các cực và không trên mặt phẳng phức. Vị trí này cho biết độ ổn định và tính chất động của hệ thống. - 5. Phân tích Bode Plot: Để xem xét đặc điểm của hệ thống trong miền tần số, ta có thể sử dụng lệnh
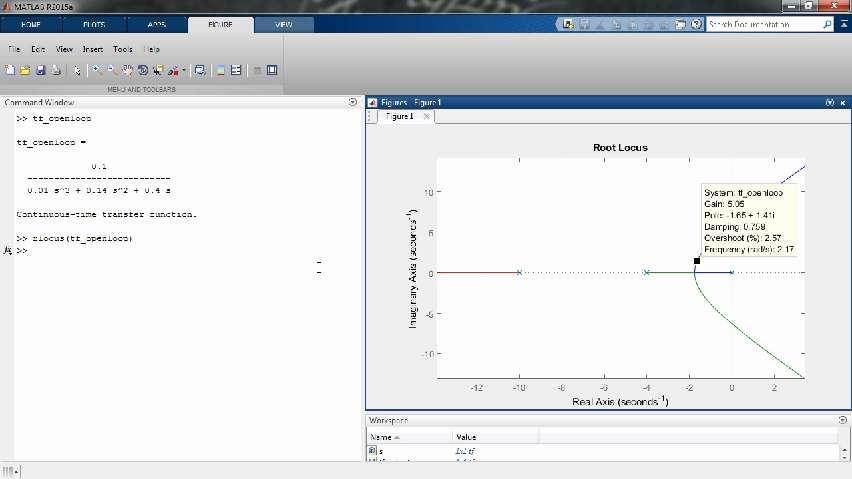
bode(). Bode Plot cung cấp thông tin về biên độ và pha của hàm truyền theo tần số, từ đó giúp đánh giá tính ổn định và đáp ứng của hệ thống đối với các tín hiệu ngõ vào khác nhau. - 6. Phân tích quỹ đạo nghiệm số (Root Locus): Sử dụng lệnh
rlocus(), người dùng có thể quan sát quỹ đạo của các cực của hệ thống khi thay đổi các tham số điều khiển. Đây là một phương pháp hữu ích để thiết kế và tinh chỉnh bộ điều khiển. - 7. Kiểm tra độ ổn định với biểu đồ Nyquist: Lệnh
nyquist()cho phép kiểm tra tính ổn định của hệ thống điều khiển thông qua biểu đồ Nyquist. Biểu đồ này cho phép người dùng xác định độ ổn định của hệ thống vòng kín. - 8. Đánh giá biên độ và pha của hệ thống: Lệnh
margin()sẽ hiển thị đồ thị biên độ và pha, cung cấp các chỉ số như biên độ an toàn (gain margin) và pha an toàn (phase margin), giúp đánh giá độ ổn định của hệ thống vòng kín.
Các phương pháp trên cung cấp cho người dùng một bộ công cụ toàn diện để phân tích và kiểm tra hệ thống điều khiển tự động sử dụng hàm truyền, giúp cải thiện và tối ưu hóa thiết kế hệ thống.
4. Kết hợp các hàm truyền
Kết hợp các hàm truyền là một phần quan trọng trong việc phân tích và thiết kế hệ thống điều khiển trong MATLAB. Hai hình thức kết hợp chính là ghép nối theo chuỗi và ghép nối song song. Mỗi phương pháp đều có các đặc điểm riêng và được áp dụng tùy vào cấu trúc của hệ thống.
4.1. Kết hợp các hàm truyền theo chuỗi
Khi các hàm truyền được kết hợp theo chuỗi, đầu ra của hàm truyền thứ nhất trở thành đầu vào của hàm truyền thứ hai. Hàm truyền tổng thể của hệ thống chuỗi là tích của các hàm truyền thành phần:
Ví dụ, nếu có hai hàm truyền:
Hàm truyền tổng thể khi kết hợp chúng theo chuỗi sẽ là:
4.2. Kết hợp các hàm truyền song song
Khi các hàm truyền được kết hợp song song, các đầu ra của chúng được cộng lại. Hàm truyền tổng thể trong trường hợp này là tổng của các hàm truyền thành phần:
Ví dụ, với hai hàm truyền:
Hàm truyền tổng thể khi kết hợp chúng theo song song sẽ là:
4.3. Kết hợp hàm truyền với vòng phản hồi
Trong hệ thống có vòng phản hồi, đầu ra của hàm truyền được đưa trở lại đầu vào. Với hai hàm truyền kết hợp theo vòng phản hồi, hàm truyền tổng thể được xác định bởi công thức:
Ví dụ, với hai hàm truyền:
Hàm truyền tổng thể khi có vòng phản hồi sẽ là:

5. Ứng dụng hàm truyền trong thiết kế điều khiển
Hàm truyền (Transfer Function) đóng vai trò quan trọng trong thiết kế hệ thống điều khiển, giúp biểu diễn mối quan hệ giữa đầu vào và đầu ra của hệ thống. Trong thiết kế điều khiển, hàm truyền được sử dụng để phân tích hành vi của hệ thống như đáp ứng tần số, ổn định, và biên độ. MATLAB cung cấp các công cụ mạnh mẽ như Control System Toolbox và các phương pháp PID, LQR để giúp các kỹ sư điều chỉnh, mô phỏng và tối ưu hóa hệ thống điều khiển.
Một ứng dụng phổ biến của hàm truyền trong thiết kế điều khiển là sử dụng bộ điều khiển PID (Proportional-Integral-Derivative). MATLAB cung cấp các công cụ để tự động điều chỉnh bộ điều khiển PID, tối ưu hóa hiệu suất hệ thống thông qua các công cụ như PID Tuner. PID giúp cân bằng giữa thời gian đáp ứng và độ bền của hệ thống, đảm bảo hệ thống có khả năng phản hồi nhanh và chính xác.
- Phân tích hệ thống: Sử dụng các công cụ phân tích đáp ứng tần số như
bode,nyquistvàstepđể hiểu rõ hành vi của hệ thống và đảm bảo tính ổn định. - Tự động điều chỉnh: Công cụ như PID Tuner hoặc lệnh điều chỉnh PID giúp tối ưu hóa các tham số điều khiển mà không cần điều chỉnh thủ công.
- Tích hợp Simulink: MATLAB cho phép mô hình hóa và kiểm tra hệ thống điều khiển trong Simulink, một môi trường mô phỏng mạnh mẽ giúp phân tích và tối ưu hóa.
Với khả năng ứng dụng rộng rãi, hàm truyền không chỉ giúp thiết kế hệ thống điều khiển chính xác mà còn giúp tăng hiệu suất và độ tin cậy của hệ thống thông qua các phân tích chuyên sâu và tối ưu hóa tự động.
XEM THÊM:
6. Tính toán hàm truyền từ phương trình vi phân
Trong các hệ thống điều khiển và xử lý tín hiệu, hàm truyền là một công cụ mạnh mẽ giúp biểu diễn mối quan hệ giữa đầu vào và đầu ra của một hệ thống dưới dạng phương trình vi phân. Để tính toán hàm truyền từ một phương trình vi phân, ta thường sử dụng phép biến đổi Laplace. Điều này chuyển các phương trình vi phân từ miền thời gian sang miền tần số, cho phép ta dễ dàng xác định hàm truyền dưới dạng \[ G(s) = \frac{Y(s)}{U(s)} \], trong đó \( Y(s) \) là đầu ra và \( U(s) \) là đầu vào.
- Bắt đầu với phương trình vi phân của hệ thống. Ví dụ: \[ \ddot{y}(t) + 2\zeta\omega_n \dot{y}(t) + \omega_n^2 y(t) = u(t) \]
- Thực hiện biến đổi Laplace của các thành phần trong phương trình, sử dụng các điều kiện ban đầu nếu cần: \[ s^2 Y(s) + 2\zeta\omega_n s Y(s) + \omega_n^2 Y(s) = U(s) \]
- Tái cấu trúc phương trình để tìm hàm truyền \[ G(s) \]: \[ G(s) = \frac{Y(s)}{U(s)} = \frac{\omega_n^2}{s^2 + 2\zeta\omega_n s + \omega_n^2} \]
Công thức này biểu diễn hệ thống điều khiển dưới dạng hàm truyền, trong đó các thành phần như độ suy giảm \(\zeta\) và tần số tự nhiên \(\omega_n\) quyết định đáp ứng của hệ thống.
| Biến | Ý nghĩa |
|---|---|
| \( Y(s) \) | Biểu diễn Laplace của đầu ra |
| \( U(s) \) | Biểu diễn Laplace của đầu vào |
| \( G(s) \) | Hàm truyền của hệ thống |
| \(\zeta\) | Hệ số suy giảm |
| \(\omega_n\) | Tần số tự nhiên của hệ thống |
7. Tổng kết
Hàm truyền (transfer function) là một công cụ quan trọng trong MATLAB, giúp phân tích và thiết kế các hệ thống điều khiển một cách hiệu quả. Việc sử dụng hàm truyền cho phép mô hình hóa và đánh giá các hệ thống phức tạp từ cơ học, điện tử đến điều khiển tự động.
- Hiệu quả và tiện lợi: MATLAB cung cấp các hàm tiện ích như
tf,series,parallelvà các hàm đáp ứng nhưstep,bode, giúp dễ dàng phân tích hệ thống. - Đa ứng dụng: Hàm truyền có thể được ứng dụng rộng rãi trong phân tích ổn định, thiết kế điều khiển và mô phỏng các hệ thống thực tế.
- Tính trực quan: Khả năng hiển thị các đồ thị như đáp ứng thời gian và tần số giúp người dùng trực quan hóa hoạt động của hệ thống một cách dễ dàng.
Nhìn chung, sử dụng hàm truyền trong MATLAB không chỉ giúp đơn giản hóa quá trình phân tích hệ thống mà còn cung cấp nhiều công cụ hỗ trợ mạnh mẽ, cho phép người dùng tiếp tục khai thác sâu hơn các khía cạnh như ổn định hệ thống và thiết kế điều khiển tối ưu.
Để tiếp tục nghiên cứu và cải thiện kỹ năng, người dùng có thể:
- Thử nghiệm các hệ thống thực tế bằng cách sử dụng các ví dụ cụ thể về cơ học, điện tử và điều khiển.
- Khám phá thêm các hàm MATLAB nâng cao trong lĩnh vực điều khiển và tối ưu hóa.
- Thực hành thiết kế và điều chỉnh bộ điều khiển như PID với các hệ thống phức tạp hơn.
Với những tính năng và lợi ích vượt trội, hàm truyền sẽ tiếp tục là công cụ hữu ích trong việc phân tích và thiết kế các hệ thống điều khiển trong MATLAB.









 Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender
Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render
Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật
D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả
Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật
VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu
Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả
Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích
Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích "Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng
"Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử
Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp
Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành
Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng
Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024
Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024