Chủ đề ultrasonic sensor and servo motor arduino code tinkercad: Trong bài viết này, chúng tôi sẽ hướng dẫn bạn cách kết hợp cảm biến siêu âm và động cơ servo với Arduino trên nền tảng Tinkercad. Bạn sẽ tìm hiểu về nguyên lý hoạt động, cách lập trình và ứng dụng thực tiễn của dự án, giúp nâng cao kỹ năng lập trình và sáng tạo trong lĩnh vực điện tử.
Mục lục
Tổng quan về cảm biến siêu âm và động cơ servo
Cảm biến siêu âm và động cơ servo là hai linh kiện quan trọng trong nhiều dự án điện tử, đặc biệt trong các ứng dụng tự động hóa và robot. Dưới đây là một cái nhìn tổng quan về từng linh kiện.
Cảm biến siêu âm (HC-SR04)
- Chức năng: Cảm biến siêu âm được sử dụng để đo khoảng cách bằng cách phát ra sóng siêu âm và đo thời gian sóng này quay trở lại.
- Nguyên lý hoạt động: Cảm biến hoạt động bằng cách phát một xung sóng siêu âm từ chân Trig và ghi lại thời gian mà sóng phản hồi về chân Echo. Khoảng cách được tính theo công thức: \[ \text{Distance} = \frac{\text{Duration} \times 0.034}{2} \]
- Ứng dụng: Cảm biến siêu âm thường được dùng trong robot để tránh vật cản, trong hệ thống cảnh báo, và nhiều ứng dụng đo khoảng cách khác.
Động cơ servo
- Chức năng: Động cơ servo cho phép điều khiển góc quay chính xác, thường được sử dụng trong các ứng dụng yêu cầu vị trí cụ thể.
- Nguyên lý hoạt động: Servo nhận tín hiệu điều khiển từ Arduino, tương ứng với góc quay mà nó cần thực hiện. Góc này thường nằm trong khoảng từ 0 đến 180 độ.
- Ứng dụng: Động cơ servo được sử dụng rộng rãi trong mô hình robot, hệ thống điều khiển vị trí, và trong nhiều sản phẩm điện tử tiêu dùng.
Kết hợp cảm biến siêu âm với động cơ servo cho phép tạo ra những ứng dụng thú vị như robot tự di chuyển, tự động tránh vật cản, hoặc hệ thống điều khiển thông minh.
.png)
Lập trình Arduino với cảm biến siêu âm và động cơ servo
Để lập trình Arduino cho dự án kết hợp cảm biến siêu âm và động cơ servo, bạn cần thực hiện theo các bước dưới đây:
1. Cài đặt môi trường lập trình Arduino
- Tải và cài đặt phần mềm Arduino IDE từ trang chính thức.
- Kết nối board Arduino với máy tính qua cổng USB.
- Mở Arduino IDE và chọn loại board và cổng kết nối phù hợp.
2. Các thư viện cần thiết
Để sử dụng động cơ servo, bạn cần thêm thư viện Servo:
- Mở Arduino IDE, vào menu Sketch -> Include Library -> Manage Libraries.
- Tìm kiếm "Servo" và cài đặt thư viện Servo nếu chưa có.
3. Viết mã cho dự án
Dưới đây là đoạn mã mẫu để điều khiển cảm biến siêu âm và động cơ servo:
#include
Servo myServo; // Khai báo đối tượng servo
const int trigPin = 9; // Chân trig
const int echoPin = 10; // Chân echo
void setup() {
myServo.attach(11); // Kết nối servo với chân 11
pinMode(trigPin, OUTPUT); // Thiết lập chân trig là đầu ra
pinMode(echoPin, INPUT); // Thiết lập chân echo là đầu vào
Serial.begin(9600); // Bắt đầu giao tiếp Serial
}
void loop() {
long duration, distance;
// Gửi tín hiệu kích hoạt
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Đo thời gian phản hồi
duration = pulseIn(echoPin, HIGH);
distance = (duration * 0.034 / 2); // Tính khoảng cách
// Điều khiển servo dựa trên khoảng cách
if (distance < 20) {
myServo.write(90); // Quay servo 90 độ
} else {
myServo.write(0); // Quay servo về 0 độ
}
// Xuất khoảng cách ra Serial Monitor
Serial.print("Distance: ");
Serial.println(distance);
delay(500); // Đợi 500 ms trước khi lặp lại
}
4. Tải lên và kiểm tra mã
- Nhấn nút Upload trên Arduino IDE để tải mã lên board Arduino.
- Mở Serial Monitor để xem kết quả đo khoảng cách.
- Kiểm tra xem động cơ servo có hoạt động đúng theo khoảng cách không.
Với các bước trên, bạn đã có thể lập trình thành công cho dự án sử dụng cảm biến siêu âm và động cơ servo. Hãy thử nghiệm và sáng tạo thêm với các ứng dụng khác nhau!
Kết nối phần cứng trên Tinkercad
Để thực hiện kết nối phần cứng cho dự án cảm biến siêu âm và động cơ servo trên Tinkercad, bạn cần làm theo các bước sau:
1. Tạo mô hình trên Tinkercad
- Đăng nhập vào tài khoản Tinkercad của bạn.
- Chọn Circuits và tạo một dự án mới.
2. Kéo thả các linh kiện
Trên giao diện Tinkercad, bạn sẽ cần các linh kiện sau:
- Board Arduino
- Cảm biến siêu âm (HC-SR04)
- Động cơ servo
- Dây nối (Jumper wires)
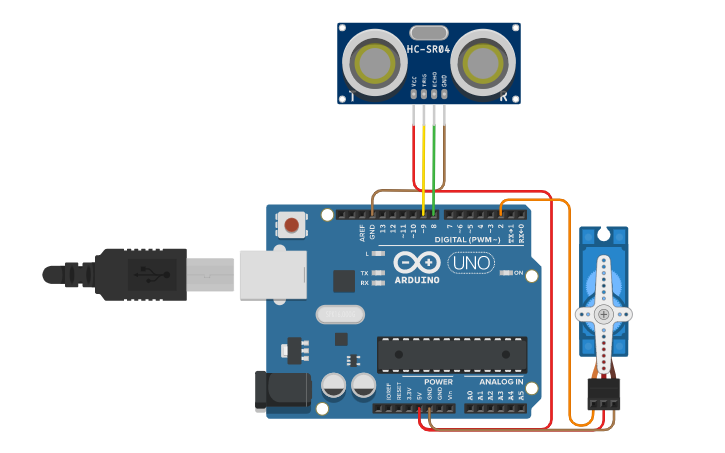
3. Kết nối cảm biến siêu âm
Thực hiện kết nối cảm biến siêu âm như sau:
- Kết nối chân VCC của cảm biến siêu âm với chân 5V trên Arduino.
- Kết nối chân GND của cảm biến với chân GND trên Arduino.
- Kết nối chân Trig của cảm biến với chân số 9 trên Arduino.
- Kết nối chân Echo của cảm biến với chân số 10 trên Arduino.
4. Kết nối động cơ servo
Thực hiện kết nối động cơ servo như sau:
- Kết nối chân VCC (thường có màu đỏ) của servo với chân 5V trên Arduino.
- Kết nối chân GND (thường có màu đen hoặc nâu) của servo với chân GND trên Arduino.
- Kết nối chân điều khiển (thường có màu vàng hoặc cam) của servo với chân số 11 trên Arduino.
5. Sơ đồ mạch điện
Dưới đây là sơ đồ mạch điện đơn giản cho kết nối này:
| Linh kiện | Kết nối |
|---|---|
| Cảm biến siêu âm | VCC - 5V, GND - GND, Trig - chân 9, Echo - chân 10 |
| Động cơ servo | VCC - 5V, GND - GND, Điều khiển - chân 11 |
Hoàn thành các kết nối trên, bạn đã sẵn sàng để lập trình và chạy mô hình trên Tinkercad. Hãy chắc chắn rằng tất cả các dây nối đều chặt chẽ và đúng vị trí để đảm bảo hoạt động của dự án.

Chạy mô hình trên Tinkercad
Sau khi hoàn tất việc lập trình và kết nối phần cứng cho dự án cảm biến siêu âm và động cơ servo, bước tiếp theo là chạy mô hình trên Tinkercad. Dưới đây là hướng dẫn chi tiết để bạn có thể thực hiện điều này.
1. Kiểm tra kết nối
- Đảm bảo tất cả các dây nối giữa cảm biến siêu âm, động cơ servo và board Arduino đều được kết nối đúng cách.
- Kiểm tra lại sơ đồ mạch điện để xác nhận không có sai sót nào trong quá trình kết nối.
2. Tải mã lên Arduino
Trong Tinkercad, bạn sẽ không cần tải mã lên như trên Arduino vật lý, nhưng bạn vẫn cần đảm bảo mã của bạn đã được nhập chính xác vào phần lập trình.
- Mở tab lập trình và kiểm tra mã đã được viết đầy đủ và chính xác.
- Đảm bảo rằng không có lỗi nào xuất hiện trong mã. Nếu có lỗi, Tinkercad sẽ hiển thị thông báo giúp bạn dễ dàng sửa chữa.
3. Bắt đầu mô phỏng
- Nhấn nút Start Simulation ở góc trên bên phải màn hình.
- Theo dõi các hoạt động của cảm biến siêu âm và động cơ servo trên giao diện mô phỏng.
4. Quan sát kết quả
Khi mô phỏng bắt đầu, hãy chú ý đến những điều sau:
- Cảm biến siêu âm sẽ đo khoảng cách và gửi tín hiệu đến động cơ servo.
- Động cơ servo sẽ quay đến góc tương ứng với khoảng cách mà cảm biến đo được.
- Thời gian đo và phản hồi của động cơ sẽ hiển thị trên màn hình Serial Monitor nếu bạn đã mở nó.
5. Điều chỉnh và tối ưu hóa
Nếu bạn muốn tối ưu hóa dự án, bạn có thể thử nghiệm với các giá trị khoảng cách khác nhau để xem động cơ servo phản hồi như thế nào:
- Thay đổi ngưỡng khoảng cách trong mã để điều khiển động cơ ở các góc khác nhau.
- Thêm các chức năng khác để làm cho mô hình của bạn thú vị hơn, chẳng hạn như ánh sáng LED hoặc âm thanh.
Bằng cách làm theo các bước trên, bạn đã có thể chạy thành công mô hình trên Tinkercad. Hãy thử nghiệm và sáng tạo để khám phá thêm nhiều khả năng thú vị từ dự án này!
Ứng dụng thực tiễn của dự án
Dự án kết hợp cảm biến siêu âm và động cơ servo với Arduino không chỉ là một bài học thú vị mà còn có nhiều ứng dụng thực tiễn trong cuộc sống hàng ngày và trong các lĩnh vực công nghệ. Dưới đây là một số ứng dụng nổi bật:
1. Robot tránh vật cản
Dự án này có thể được áp dụng để xây dựng các robot tự động có khả năng di chuyển mà không va chạm với vật cản. Khi cảm biến siêu âm phát hiện vật cản trong khoảng cách nhất định, động cơ servo có thể điều chỉnh hướng đi của robot.
2. Hệ thống cảnh báo
Cảm biến siêu âm có thể được sử dụng để phát hiện khoảng cách đến các đối tượng. Dựa trên khoảng cách đo được, hệ thống có thể phát ra cảnh báo khi có vật thể tiến gần quá mức, rất hữu ích trong các ứng dụng an toàn.
3. Ứng dụng trong xe tự hành
Trong các hệ thống xe tự hành, cảm biến siêu âm được sử dụng để đo khoảng cách đến các phương tiện hoặc chướng ngại vật xung quanh. Động cơ servo có thể điều chỉnh hướng di chuyển của xe, giúp xe hoạt động an toàn và hiệu quả hơn.
4. Hệ thống tưới cây tự động
Bằng cách kết hợp cảm biến siêu âm để đo khoảng cách giữa nước và đất, bạn có thể tạo ra một hệ thống tưới cây tự động. Động cơ servo có thể mở hoặc đóng van nước dựa trên độ ẩm của đất, giúp tiết kiệm nước và bảo vệ môi trường.
5. Thiết bị giáo dục
Dự án này cũng có thể được sử dụng trong giáo dục để dạy học sinh về lập trình, điện tử và nguyên lý vật lý. Nó giúp học sinh hiểu rõ hơn về cách thức hoạt động của cảm biến và động cơ, đồng thời kích thích sự sáng tạo và tư duy logic.
Với những ứng dụng đa dạng này, dự án kết hợp cảm biến siêu âm và động cơ servo không chỉ là một mô hình thú vị mà còn có giá trị thực tiễn cao, mở ra nhiều cơ hội cho việc nghiên cứu và phát triển công nghệ trong tương lai.

Khắc phục sự cố và tối ưu hóa mã
Khi làm việc với dự án cảm biến siêu âm và động cơ servo trên Arduino, có thể xảy ra một số sự cố trong quá trình lập trình và chạy mô hình. Dưới đây là hướng dẫn khắc phục sự cố và cách tối ưu hóa mã của bạn.
1. Kiểm tra kết nối phần cứng
- Đảm bảo rằng tất cả các dây nối giữa cảm biến siêu âm, động cơ servo và board Arduino đều được kết nối đúng cách.
- Xem xét lại sơ đồ kết nối để xác nhận không có dây nào bị lỏng hoặc kết nối sai.
2. Xử lý lỗi lập trình
- Kiểm tra kỹ mã của bạn để đảm bảo không có lỗi cú pháp. Tinkercad sẽ hiển thị thông báo lỗi nếu có vấn đề.
- Sử dụng Serial Monitor để theo dõi giá trị đo được từ cảm biến siêu âm, giúp bạn phát hiện vấn đề nhanh chóng.
3. Tối ưu hóa mã
Dưới đây là một số mẹo để tối ưu hóa mã của bạn:
- Giảm thời gian chờ: Trong hàm
loop(), bạn có thể giảm thời gian delay để tăng tốc độ phản hồi của hệ thống. - Tránh tính toán lặp lại: Nếu bạn đang thực hiện các phép toán không thay đổi trong vòng lặp, hãy chuyển chúng ra ngoài vòng lặp.
- Thêm bình luận: Ghi chú rõ ràng trong mã để dễ dàng theo dõi và hiểu cách hoạt động của từng phần.
4. Kiểm tra các giá trị khoảng cách
Đảm bảo rằng các giá trị mà bạn sử dụng để điều khiển động cơ servo là hợp lý:
- Kiểm tra ngưỡng khoảng cách mà bạn đã thiết lập trong mã. Đảm bảo rằng nó phù hợp với ứng dụng thực tế.
- Thử nghiệm với các giá trị khác nhau để tìm ra mức tối ưu cho dự án của bạn.
5. Đánh giá hiệu suất
Sau khi thực hiện các điều chỉnh, hãy đánh giá lại hiệu suất của dự án:
- Xem xét thời gian phản hồi của động cơ servo và độ chính xác của cảm biến siêu âm.
- Nếu cần thiết, thực hiện các điều chỉnh tiếp theo để cải thiện hiệu suất.
Bằng cách khắc phục sự cố và tối ưu hóa mã của bạn, bạn có thể nâng cao hiệu suất của dự án và tận dụng tối đa các linh kiện mà bạn đang sử dụng. Điều này không chỉ giúp hệ thống hoạt động mượt mà hơn mà còn giúp bạn học hỏi và phát triển kỹ năng lập trình của mình.
XEM THÊM:














 Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender
Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render
Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật
D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả
Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật
VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu
Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả
Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích
Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích "Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng
"Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử
Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp
Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành
Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng
Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024
Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024