Chủ đề meshlab point cloud to mesh: Khám phá cách sử dụng MeshLab để chuyển đổi dữ liệu Point Cloud thành Mesh một cách hiệu quả và chuyên nghiệp. Bài viết cung cấp hướng dẫn chi tiết, các mẹo tối ưu hóa, và ứng dụng thực tiễn trong nhiều lĩnh vực như kiến trúc, thiết kế công nghiệp và nghiên cứu khoa học. Tìm hiểu ngay để tận dụng tối đa sức mạnh của dữ liệu 3D!
Mục lục
- 1. Tổng quan về MeshLab và Point Cloud
- 2. Chuẩn bị dữ liệu Point Cloud
- 3. Hướng dẫn sử dụng MeshLab để chuyển đổi Point Cloud sang Mesh
- 4. Làm sạch và tối ưu hóa Mesh
- 5. Xuất tệp Mesh và ứng dụng thực tế
- 6. Các công cụ và giải pháp thay thế cho MeshLab
- 7. Thách thức và lưu ý khi xử lý dữ liệu Point Cloud
- 8. Xu hướng và tương lai của công nghệ Point Cloud
1. Tổng quan về MeshLab và Point Cloud
MeshLab là một phần mềm mã nguồn mở mạnh mẽ, được thiết kế để xử lý và chỉnh sửa các mô hình 3D phức tạp. Nó hỗ trợ một loạt các công cụ để thao tác và tối ưu hóa dữ liệu 3D, đặc biệt trong việc chuyển đổi từ đám mây điểm (point cloud) sang mô hình lưới tam giác (mesh).
Point Cloud là tập hợp các điểm không gian 3D, thường được thu thập bằng cách quét laser hoặc cảm biến Lidar. Mỗi điểm chứa thông tin về vị trí trong không gian 3D, màu sắc hoặc cường độ phản xạ ánh sáng. Đám mây điểm được sử dụng rộng rãi trong các ngành như kiến trúc, xây dựng và kỹ thuật để tạo các mô hình kỹ thuật số chính xác.
-
Ứng dụng của Point Cloud:
- Khảo sát hiện trạng công trình để xác định các điều kiện thực tế.
- Xây dựng mô hình 3D cho các dự án nâng cấp và cải tạo.
- Phân tích cấu trúc phức tạp hoặc môi trường khó tiếp cận.
-
Vai trò của MeshLab:
- Hỗ trợ chuyển đổi đám mây điểm sang mô hình lưới tam giác, giúp tối ưu hóa dữ liệu 3D.
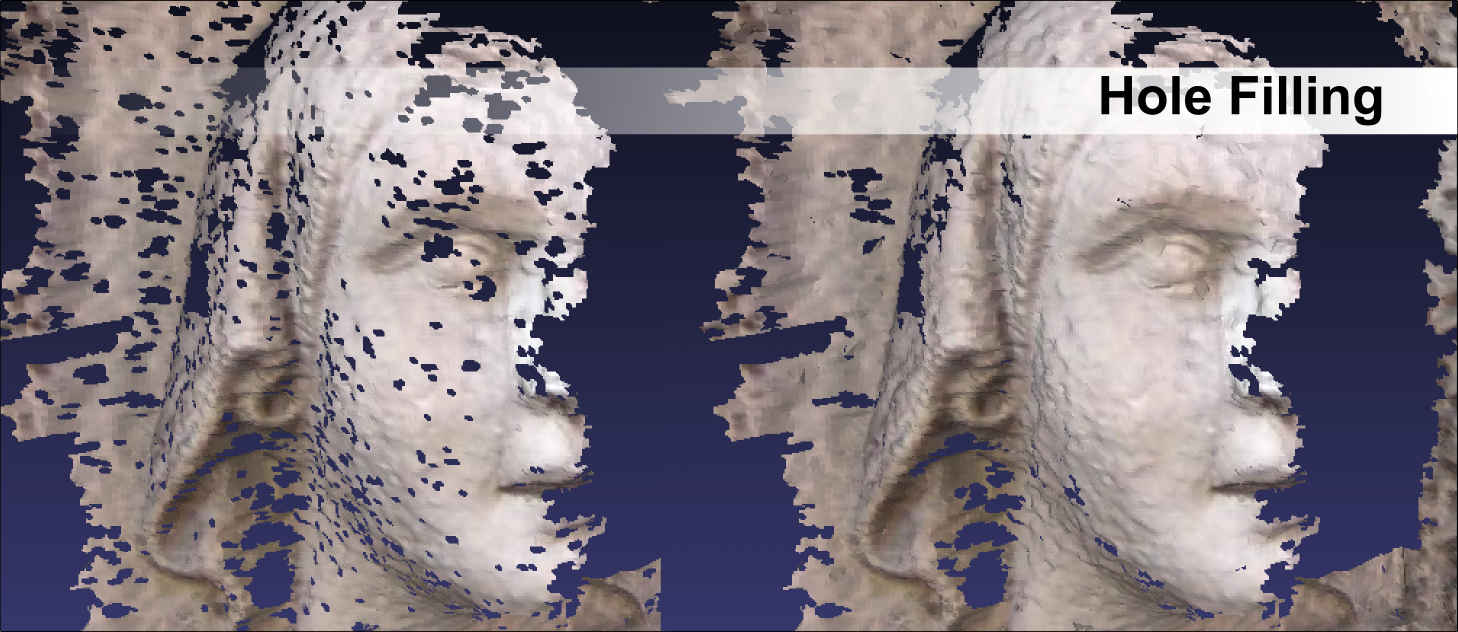
- Cung cấp các công cụ làm sạch dữ liệu như loại bỏ nhiễu hoặc lấp đầy các lỗ trống trong mô hình.
- Xuất file mô hình 3D dưới nhiều định dạng phổ biến để sử dụng trong các phần mềm khác như AutoCAD hoặc Blender.
Quy trình cơ bản để chuyển đổi đám mây điểm thành mô hình lưới trên MeshLab bao gồm:
- Nhập dữ liệu: Tải tệp đám mây điểm vào MeshLab. Đảm bảo dữ liệu được thu thập đầy đủ và đúng định dạng (như PLY hoặc LAS).
- Làm sạch và lọc dữ liệu: Sử dụng các công cụ của MeshLab để loại bỏ các điểm nhiễu hoặc không cần thiết.
- Chuyển đổi sang lưới: Áp dụng thuật toán Delaunay hoặc các phương pháp dựng hình để tạo lưới tam giác từ các điểm.
- Tối ưu hóa: Làm mịn và chỉnh sửa lưới để loại bỏ các lỗi và cải thiện độ chi tiết của mô hình.
- Xuất dữ liệu: Lưu mô hình ở định dạng mong muốn để sử dụng hoặc chỉnh sửa tiếp trong các phần mềm khác.
Việc sử dụng kết hợp MeshLab và đám mây điểm không chỉ giúp tiết kiệm thời gian mà còn tối ưu hóa chi phí trong các dự án cần mô hình hóa 3D.

.png)
2. Chuẩn bị dữ liệu Point Cloud
Chuẩn bị dữ liệu Point Cloud là bước quan trọng để đảm bảo quá trình chuyển đổi sang mô hình lưới (mesh) diễn ra suôn sẻ và đạt hiệu quả cao. Dữ liệu này thường được tạo ra từ các công nghệ quét 3D như LiDAR, photogrammetry hoặc các thiết bị quét laser cầm tay. Dưới đây là các bước chi tiết:
-
Thu thập dữ liệu ban đầu: Sử dụng các thiết bị quét 3D phù hợp, như LiDAR hoặc máy quét laser, để thu thập dữ liệu từ đối tượng hoặc khu vực cần nghiên cứu. Quá trình này tạo ra một tập hợp điểm (point cloud) thể hiện hình học của đối tượng trong không gian ba chiều.
- Thiết bị quét cố định: Phù hợp cho các đối tượng nhỏ hoặc không gian nội thất.
- Thiết bị quét di động hoặc trên không: Sử dụng để quét các khu vực lớn hoặc địa hình phức tạp.
-
Tiền xử lý dữ liệu: Dữ liệu thô cần được làm sạch để loại bỏ các nhiễu và chuẩn hóa về định dạng. Quá trình này bao gồm:
- Loại bỏ điểm dư thừa hoặc nhiễu.
- Gộp các tập dữ liệu từ nhiều lần quét thành một tập point cloud duy nhất.
- Chuyển đổi định dạng nếu cần thiết (ví dụ: từ LAS sang PLY).
-
Phân tích và tổ chức dữ liệu: Sử dụng phần mềm chuyên dụng như MeshLab, Global Mapper hoặc Autodesk Recap để kiểm tra và tổ chức dữ liệu trước khi tạo lưới. Một số tác vụ quan trọng:
- Kiểm tra mật độ và chất lượng của các điểm trong tập dữ liệu.
- Định hướng dữ liệu để dễ dàng xử lý trong các bước tiếp theo.
-
Chuẩn bị cho quá trình chuyển đổi: Đảm bảo dữ liệu đã sẵn sàng để đưa vào phần mềm tạo lưới. Lựa chọn cấu hình và thông số phù hợp để tối ưu hóa chất lượng đầu ra.
Khi hoàn tất bước chuẩn bị, bạn có thể tiến hành chuyển đổi dữ liệu Point Cloud sang mô hình lưới, giúp tạo ra các mô hình 3D chính xác, phục vụ thiết kế và phân tích kỹ thuật.
3. Hướng dẫn sử dụng MeshLab để chuyển đổi Point Cloud sang Mesh
MeshLab là một công cụ mạnh mẽ, phổ biến trong việc xử lý dữ liệu 3D, đặc biệt là chuyển đổi Point Cloud sang dạng lưới (Mesh). Dưới đây là hướng dẫn từng bước giúp bạn thực hiện quy trình này một cách hiệu quả.
-
Chuẩn bị dữ liệu:
Đảm bảo dữ liệu Point Cloud đã được làm sạch và lưu dưới các định dạng như .PLY, .XYZ hoặc .OBJ. Sử dụng các công cụ khác nếu cần thiết để loại bỏ nhiễu và căn chỉnh dữ liệu.
-
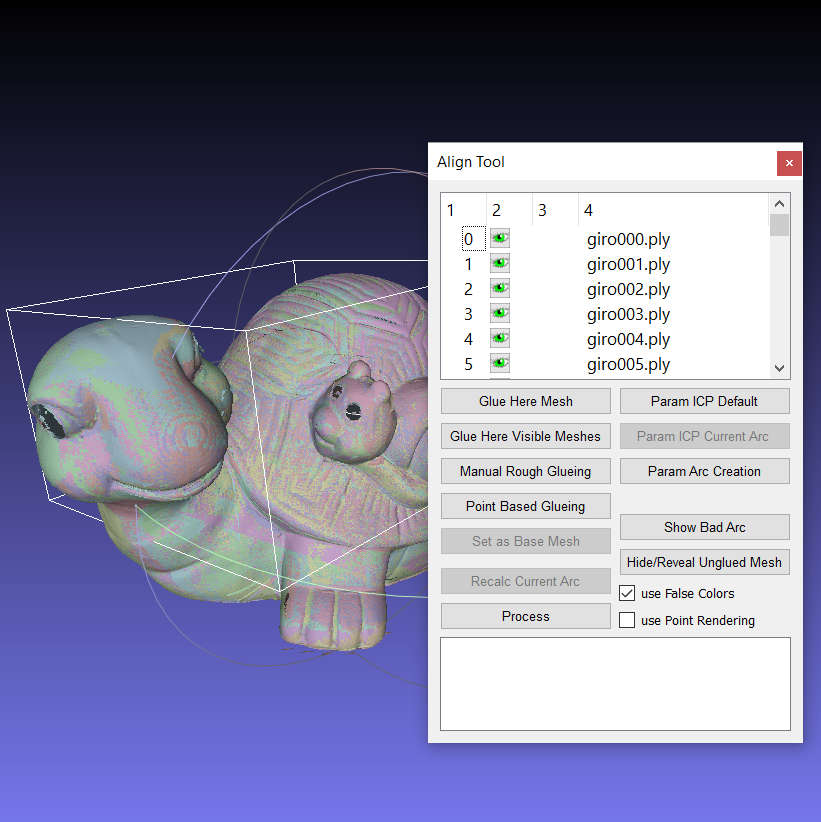
Nhập dữ liệu vào MeshLab:
- Mở MeshLab và chọn File > Import Mesh.
- Chọn tệp Point Cloud và nhấn Open để tải dữ liệu.
-
Xử lý dữ liệu:
-
Sử dụng công cụ Filters > Cleaning and Repairing > Remove Duplicated Vertices để loại bỏ các điểm trùng lặp.
-
Áp dụng Filters > Normals, Curvatures and Orientation > Compute Normals để tính toán hướng bình thường cho các điểm.
-
-
Chuyển đổi sang Mesh:
-
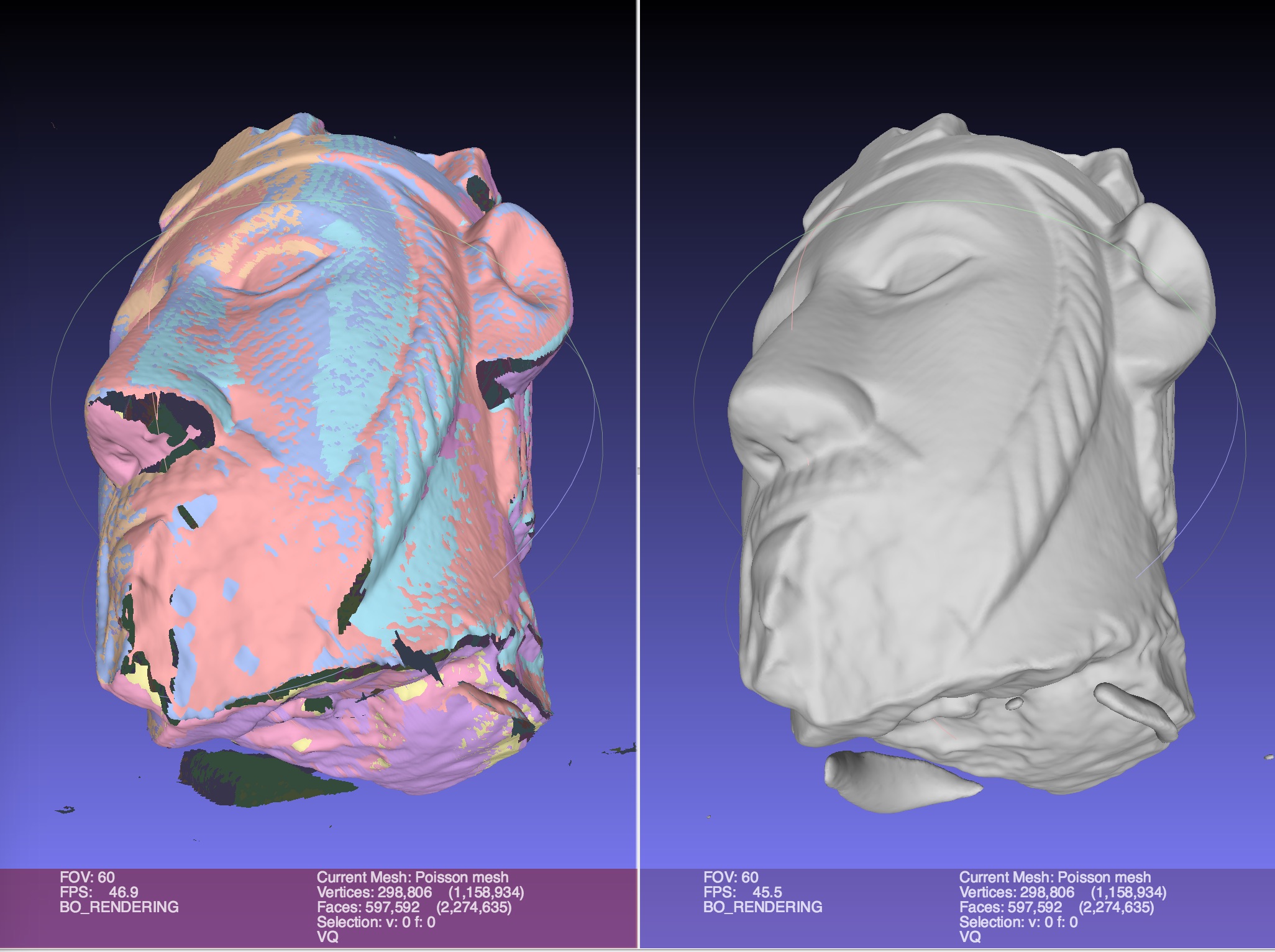
Sử dụng Filters > Remeshing, Simplification and Reconstruction > Poisson Surface Reconstruction để tạo lưới từ Point Cloud.
-
Điều chỉnh các tham số như độ sâu (Depth) để cân bằng giữa độ chi tiết và hiệu suất xử lý.
-
-
Kiểm tra và xuất lưới:
-
Sử dụng các công cụ như Filters > Mesh Cleaning > Remove Isolated Pieces để loại bỏ các thành phần lưới không mong muốn.
-
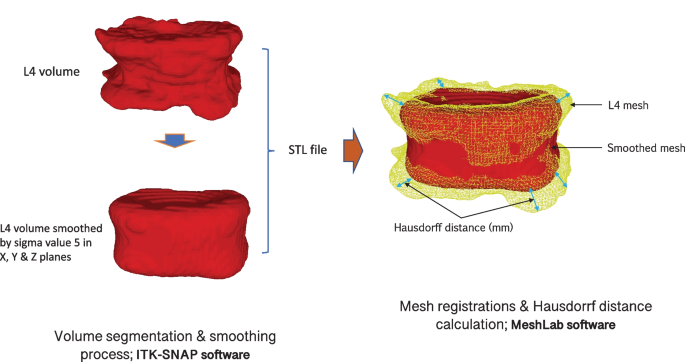
Xuất lưới bằng cách chọn File > Export Mesh As, lưu ở định dạng phù hợp như .OBJ hoặc .STL.
-
Quy trình trên giúp bạn dễ dàng chuyển đổi dữ liệu Point Cloud sang lưới chất lượng cao, phù hợp cho các ứng dụng như in 3D, mô phỏng hoặc phân tích hình học.

4. Làm sạch và tối ưu hóa Mesh
Việc làm sạch và tối ưu hóa mesh là bước quan trọng trong quá trình chuyển đổi dữ liệu Point Cloud thành mô hình 3D. Bước này giúp loại bỏ các điểm dữ liệu không cần thiết và cải thiện chất lượng của mesh.
- Loại bỏ nhiễu và điểm ngoài (outliers): Khi dữ liệu Point Cloud thu được từ các thiết bị quét 3D, đặc biệt là từ Kinect, thường sẽ có những điểm ngoài không liên quan đến đối tượng mô hình. Những điểm này có thể làm biến dạng mesh, gây ra các sai lệch khi hiển thị 3D. Để loại bỏ các điểm ngoài, bạn có thể sử dụng các bộ lọc trong MeshLab, như phương pháp Poisson Disk Sampling, giúp làm giảm thiểu các điểm không hợp lý mà vẫn giữ lại độ chi tiết của bề mặt.
- Tối ưu hóa độ phân giải và giảm thiểu điểm: Để xử lý hiệu quả các Point Cloud có lượng điểm lớn, MeshLab cung cấp các kỹ thuật giảm mẫu (subsampling) như Poisson Disk Sampling. Phương pháp này giúp bạn chọn lọc và giữ lại các điểm quan trọng, giảm tải cho hệ thống mà không làm mất quá nhiều chi tiết.
- Điều chỉnh bề mặt: Sau khi loại bỏ nhiễu và tối ưu hóa điểm, bạn có thể sử dụng các công cụ của MeshLab để làm mịn và tái tạo bề mặt của mesh. Điều này giúp tạo ra các mô hình 3D mượt mà và chính xác hơn.
- Cải thiện độ chính xác bề mặt: MeshLab cung cấp các bộ lọc như "Laplacian Smoothing" để làm mềm bề mặt của mesh mà không làm giảm độ chi tiết quá nhiều. Bộ lọc này giúp làm mượt các bất thường hoặc gồ ghề không mong muốn trên mô hình 3D.
Việc tối ưu hóa mesh sau khi chuyển đổi từ Point Cloud giúp cải thiện hiệu suất khi xử lý các mô hình 3D phức tạp và đảm bảo rằng các mô hình này có thể được sử dụng cho các ứng dụng khác như in 3D, thực tế ảo (VR), hoặc phân tích kỹ thuật.

5. Xuất tệp Mesh và ứng dụng thực tế
Sau khi hoàn thành quá trình chuyển đổi point cloud thành mesh trong MeshLab, bước tiếp theo là xuất tệp mesh để sử dụng trong các ứng dụng thực tế. Các tệp mesh có thể được xuất ở nhiều định dạng khác nhau, như .obj, .ply, .stl, hoặc .dae, tùy thuộc vào nhu cầu sử dụng.
Để xuất tệp mesh trong MeshLab, bạn làm theo các bước sau:
- Vào menu File và chọn Export Mesh As....
- Chọn định dạng tệp bạn muốn xuất (ví dụ: .obj, .ply, .stl). Trong trường hợp này, .obj là định dạng phổ biến, vì nó hỗ trợ cả màu sắc đỉnh (vertex color) và có thể dễ dàng sử dụng trong các phần mềm khác như Unity hoặc Blender.
- Nhấn OK và lựa chọn các tùy chọn cần thiết, như xuất các thông tin màu sắc từ các đỉnh (vertex color) nếu có.
- Khi xuất tệp, nếu có texture được gán cho mesh, bạn sẽ cần đảm bảo rằng texture đã được lưu dưới dạng file riêng, chẳng hạn như .png hoặc .jpg, để có thể sử dụng được trong các ứng dụng 3D khác.
Sau khi xuất tệp, bạn có thể sử dụng mesh trong nhiều ứng dụng khác nhau, chẳng hạn như:
- Ứng dụng thực tế ảo (VR) và tăng cường (AR): Mesh đã được chuyển đổi và tối ưu có thể được sử dụng trong các ứng dụng VR hoặc AR, giúp tạo ra các trải nghiệm 3D sống động.
- Thiết kế sản phẩm và mô phỏng 3D: Các nhà thiết kế có thể sử dụng mesh để mô phỏng và thử nghiệm sản phẩm trong các phần mềm như Autodesk Maya, Blender, hoặc Unity.
- In 3D: Mesh có thể được xuất dưới dạng .stl để sử dụng trong các máy in 3D, giúp tạo ra các mô hình vật lý từ dữ liệu số.
MeshLab là một công cụ mạnh mẽ không chỉ để chuyển đổi point cloud thành mesh mà còn hỗ trợ rất nhiều ứng dụng thực tế khác, từ thiết kế đồ họa đến sản xuất và mô phỏng.

6. Các công cụ và giải pháp thay thế cho MeshLab
Trong quá trình xử lý dữ liệu point cloud và chuyển đổi chúng thành mesh, MeshLab là một trong những công cụ phổ biến nhất, nhưng còn nhiều phần mềm khác có thể thay thế hoặc bổ sung cho MeshLab trong các trường hợp khác nhau. Dưới đây là một số công cụ thay thế phổ biến:
- CloudCompare: Là một phần mềm mã nguồn mở chuyên xử lý point cloud và mesh. CloudCompare hỗ trợ nhiều tính năng mạnh mẽ như xử lý dữ liệu 3D từ laser scan, và có thể xử lý các điểm cloud lớn với các chức năng tương tự MeshLab.
- Pix4D: Là phần mềm chuyên về quét 3D từ hình ảnh và tạo mô hình 3D từ dữ liệu drone. Pix4D được sử dụng trong các lĩnh vực như khảo sát địa lý và xây dựng, đặc biệt là khi cần chính xác cao trong việc chuyển đổi từ ảnh hoặc video sang 3D models.
- WebODM: Là một công cụ mã nguồn mở khác, hỗ trợ xử lý ảnh chụp từ drone để tạo bản đồ 2D và mô hình 3D. WebODM đặc biệt thích hợp cho các ứng dụng trong khảo sát địa lý và thiết kế công nghiệp, và có khả năng xử lý đa nền tảng.
- Geomagic Design X: Đây là phần mềm mạnh mẽ cho việc thiết kế ngược (reverse engineering), cho phép chuyển đổi dữ liệu scan 3D thành các mô hình CAD có thể sử dụng trong các phần mềm thiết kế kỹ thuật như AutoCAD.
- PointKit: Là phần mềm tích hợp nhiều công cụ xử lý point cloud và mesh, phục vụ cho cả phân tích và chia sẻ dữ liệu. Nó được thiết kế cho các ứng dụng cần khả năng cộng tác và phân tích dữ liệu 3D chi tiết.
- Quick3D: Là công cụ chuyển đổi định dạng tệp 3D, hỗ trợ người dùng chuyển đổi giữa nhiều định dạng như STL, OBJ, PLY, giúp dễ dàng sử dụng dữ liệu mesh trong các phần mềm khác nhau.
Những công cụ thay thế này có những ưu điểm và hạn chế riêng, tùy thuộc vào yêu cầu dự án và khả năng tài chính mà bạn có thể chọn phần mềm phù hợp để xử lý dữ liệu point cloud của mình.
XEM THÊM:
7. Thách thức và lưu ý khi xử lý dữ liệu Point Cloud
Xử lý dữ liệu Point Cloud để chuyển đổi sang Mesh trong MeshLab là một quy trình khá phức tạp và đòi hỏi sự chú ý đến từng chi tiết. Dưới đây là một số thách thức và lưu ý quan trọng khi làm việc với dữ liệu này:
- Chất lượng dữ liệu đầu vào: Dữ liệu Point Cloud thường có rất nhiều điểm không chính xác hoặc nhiễu, đặc biệt khi thu thập từ các thiết bị như Kinect. Điều này đòi hỏi phải làm sạch và lọc các điểm nhiễu trước khi chuyển đổi.
- Giảm độ phân giải: Đôi khi, để xử lý hiệu quả hơn, cần phải giảm độ phân giải của Point Cloud thông qua phương pháp subsampling. Tuy nhiên, điều này có thể làm mất đi một phần chi tiết, vì vậy cần cân nhắc khi sử dụng các phương pháp này.
- Chọn thuật toán tái tạo mặt: MeshLab cung cấp nhiều thuật toán tái tạo mặt như Poisson Disk và Marching Cubes. Mỗi thuật toán có ưu nhược điểm riêng, và việc chọn đúng thuật toán phụ thuộc vào tính chất dữ liệu và mục đích sử dụng. Ví dụ, Poisson Disk thường hiệu quả với dữ liệu có hình dạng phức tạp.
- Khả năng xử lý của phần mềm: Khi làm việc với dữ liệu Point Cloud có số lượng điểm rất lớn, MeshLab có thể gặp khó khăn trong việc xử lý và thường xuyên bị treo. Điều này yêu cầu người dùng phải chia nhỏ dữ liệu hoặc sử dụng phần cứng mạnh mẽ hơn để giảm thiểu tình trạng này.
- Cần sự chính xác khi tạo Normals: Việc tính toán Normals chính xác là một bước quan trọng để MeshLab có thể xác định được hướng của các điểm trong không gian 3D, từ đó tạo ra bề mặt phù hợp. Bất kỳ lỗi nhỏ nào trong quá trình này cũng có thể gây ra kết quả không chính xác.
Để đạt được kết quả tốt nhất, người dùng cần kiên nhẫn trong quá trình xử lý và liên tục kiểm tra kết quả sau mỗi bước. Bằng cách lựa chọn kỹ thuật và phương pháp phù hợp, bạn có thể tạo ra những mô hình 3D chính xác và chất lượng từ dữ liệu Point Cloud.

8. Xu hướng và tương lai của công nghệ Point Cloud
Trong những năm gần đây, công nghệ Point Cloud đã trở thành một công cụ quan trọng trong các ngành công nghiệp như xây dựng, bảo tồn di sản, và thiết kế 3D. Việc thu thập dữ liệu 3D chính xác từ các hệ thống quét laser hoặc máy bay không người lái đã tạo ra cơ hội mới cho việc xây dựng mô hình số hóa chi tiết, hỗ trợ công việc từ khảo sát địa hình đến thiết kế kiến trúc.
Công nghệ Point Cloud đang tiếp tục phát triển mạnh mẽ nhờ vào sự tiến bộ của các công cụ phần mềm và phần cứng. Đặc biệt, MeshLab và các phần mềm xử lý Point Cloud khác đang cung cấp các tính năng mạnh mẽ cho việc chuyển đổi dữ liệu thành mô hình Mesh, giúp tối ưu hóa quy trình thiết kế và sản xuất trong các ngành công nghiệp.
- Tiến bộ trong công nghệ quét laser 3D: Công nghệ quét laser đang ngày càng trở nên chính xác và hiệu quả hơn, cho phép thu thập dữ liệu Point Cloud ở mức độ chi tiết cao hơn, điều này mở ra cơ hội mới cho các ngành công nghiệp như bảo tồn di sản, khảo sát, và thiết kế nội thất.
- Ứng dụng AI và học máy: AI và học máy đang được tích hợp vào công nghệ Point Cloud, giúp tự động hóa các quá trình như phân loại điểm, nhận diện đối tượng và tối ưu hóa mô hình. Điều này sẽ giúp giảm thời gian và chi phí trong việc xử lý dữ liệu 3D.
- Ứng dụng trong thực tế ảo (VR) và thực tế tăng cường (AR): Dữ liệu Point Cloud sẽ được sử dụng nhiều hơn trong các ứng dụng VR và AR, giúp tạo ra các mô hình 3D sống động cho trải nghiệm người dùng. Các ngành như thiết kế kiến trúc, y học, và giáo dục sẽ là những lĩnh vực hưởng lợi lớn từ sự phát triển này.
- Công nghệ đám mây và lưu trữ: Với sự phát triển của công nghệ đám mây, việc lưu trữ và xử lý dữ liệu Point Cloud sẽ trở nên dễ dàng và tiết kiệm chi phí hơn, giúp các doanh nghiệp có thể chia sẻ và truy cập dữ liệu mọi lúc mọi nơi.
Nhìn về tương lai, công nghệ Point Cloud hứa hẹn sẽ tiếp tục mở rộng ứng dụng trong nhiều lĩnh vực, từ xây dựng, bảo tồn di sản, cho đến các ứng dụng trong thực tế ảo và trí tuệ nhân tạo. Các cải tiến về phần mềm và phần cứng sẽ mang lại những tiến bộ đáng kể, thúc đẩy sự đổi mới trong việc thiết kế và mô phỏng 3D.













 Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender
Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render
Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật
D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả
Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật
VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu
Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả
Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích
Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích "Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng
"Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử
Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp
Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành
Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng
Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024
Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024