Chủ đề matlab quaternion: Matlab Quaternion là công cụ mạnh mẽ trong việc xử lý các phép toán xoay và biến đổi không gian 3D. Bài viết này sẽ hướng dẫn chi tiết cách sử dụng quaternion trong Matlab, cùng các ứng dụng quan trọng trong đồ họa máy tính, robot học và nhiều lĩnh vực khác, giúp bạn tận dụng tối đa công cụ này cho các dự án kỹ thuật của mình.
Mục lục
- Giới thiệu về Quaternion trong Matlab
- 1. Giới thiệu về Quaternion trong Matlab
- 2. Cách tạo và sử dụng Quaternion trong Matlab
- 3. Sự khác biệt giữa Quaternion và Ma trận Xoay
- 4. Ứng dụng của Quaternion trong đồ họa máy tính và lập trình game
- 5. Ứng dụng của Quaternion trong robot học
- 6. Các công cụ và thư viện hỗ trợ làm việc với Quaternion trong Matlab
- 7. Tổng kết
Giới thiệu về Quaternion trong Matlab
Quaternion là một khái niệm toán học được sử dụng rộng rãi trong nhiều lĩnh vực như đồ họa máy tính, lập trình game, và robot học. Trong Matlab, quaternion được hỗ trợ thông qua các hàm và công cụ tính toán mạnh mẽ, giúp người dùng dễ dàng thao tác với các phép biến đổi không gian.
1. Định nghĩa về Quaternion
Quaternion là một loại số phức có dạng:
\[ q = w + xi + yj + zk \]
Trong đó:
- \( w \): Thành phần thực.
- \( x, y, z \): Các thành phần ảo.
- \( i, j, k \): Các đơn vị ảo thỏa mãn điều kiện \( i^2 = j^2 = k^2 = ijk = -1 \).
2. Ứng dụng của Quaternion
Quaternion được ứng dụng trong nhiều lĩnh vực, trong đó có:
- Biến đổi hình học trong không gian 3D, bao gồm xoay đối tượng.
- Điều khiển robot với các phép tính toán mô phỏng chuyển động.
- Xử lý đồ họa máy tính trong các phần mềm lập trình game như Unity hoặc Unreal Engine.
3. Các hàm liên quan đến Quaternion trong Matlab
Matlab cung cấp các hàm để thao tác với quaternion, bao gồm:
quaternion: Tạo đối tượng quaternion.norm: Tính chuẩn của một quaternion.mtimes: Nhân quaternion với nhau.inv: Tìm nghịch đảo của một quaternion.
4. Ví dụ về sử dụng Quaternion trong Matlab
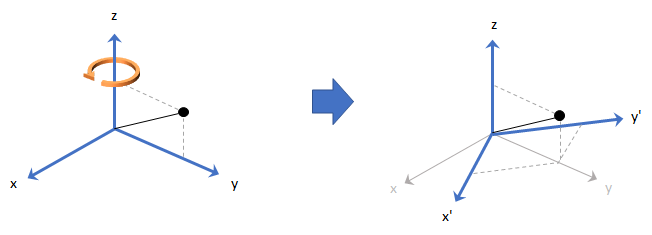
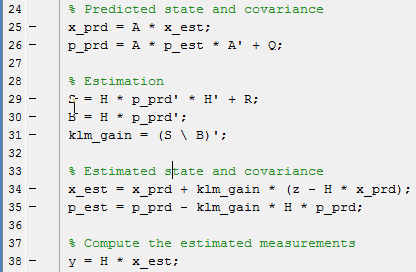
Dưới đây là một ví dụ về cách sử dụng quaternion để xoay một vector trong không gian 3D:
% Tạo quaternion đại diện cho phép xoay 90 độ quanh trục Z
q = quaternion([0, 0, 1], 90, 'eulerd', 'zyx', 'frame');
% Vector ban đầu
v = [1; 0; 0];
% Xoay vector
v_rot = rotateframe(q, v);
5. So sánh với ma trận xoay
So với việc sử dụng ma trận xoay, quaternion có nhiều ưu điểm như:
- Giảm hiện tượng gimbal lock (khóa trục).
- Đơn giản hơn trong việc tính toán và tiết kiệm tài nguyên xử lý.
- Tránh được sai số khi thực hiện nhiều phép xoay liên tiếp.
6. Tổng kết
Quaternion là một công cụ mạnh mẽ trong tính toán không gian 3D và đã được tích hợp sẵn trong Matlab. Nhờ tính tiện dụng và hiệu quả của nó, quaternion được sử dụng phổ biến trong nhiều lĩnh vực như lập trình game, điều khiển robot, và xử lý đồ họa máy tính.

.png)
1. Giới thiệu về Quaternion trong Matlab
Quaternion là một công cụ toán học quan trọng được sử dụng trong nhiều lĩnh vực như đồ họa 3D, lập trình game, và robot học. Trong Matlab, quaternion được biểu diễn như một phần mở rộng của số phức, giúp mô phỏng các phép xoay và biến đổi không gian một cách hiệu quả và chính xác hơn so với ma trận xoay thông thường.
Một quaternion \( q \) có dạng tổng quát:
\[ q = w + xi + yj + zk \]
Trong đó:
- \( w \): Thành phần thực của quaternion.
- \( x, y, z \): Thành phần ảo, tương ứng với các trục \( i, j, k \) trong không gian 3 chiều.
- Các đơn vị ảo thỏa mãn điều kiện \( i^2 = j^2 = k^2 = ijk = -1 \), tạo nên một hệ thống toán học đặc biệt.
Trong Matlab, quaternion được hỗ trợ thông qua các hàm tích hợp, cho phép dễ dàng thao tác với các phép toán xoay, chẳng hạn như:
- Tạo và xử lý đối tượng quaternion.
- Thực hiện các phép nhân, chia, và nghịch đảo quaternion.
- Áp dụng quaternion để xoay các đối tượng trong không gian 3D mà không gặp hiện tượng "gimbal lock" như khi dùng ma trận xoay.
Ví dụ, với một phép xoay quanh trục \( z \) một góc 90 độ, bạn có thể tạo một quaternion như sau:
\[ q = quaternion([0, 0, 1], 90, 'eulerd', 'zyx', 'frame') \]
Nhờ sự chính xác và hiệu quả trong các tính toán không gian, quaternion trở thành một công cụ không thể thiếu trong Matlab khi xử lý các bài toán liên quan đến xoay và chuyển động trong không gian 3D.
2. Cách tạo và sử dụng Quaternion trong Matlab
Trong Matlab, bạn có thể tạo và thao tác với quaternion dễ dàng thông qua các hàm được cung cấp sẵn. Quaternion được sử dụng rộng rãi trong các lĩnh vực như robot học, đồ họa máy tính, và mô phỏng chuyển động 3D. Dưới đây là cách bạn có thể tạo và sử dụng quaternion trong Matlab:
- Tạo quaternion: Bạn có thể khởi tạo quaternion bằng cách sử dụng hàm
quaternion. Ví dụ:q = quaternion([1, 2, 3, 4]); - Phân tích các thành phần: Để truy xuất các thành phần thực và ảo của quaternion, sử dụng hàm
parts. Ví dụ:[a, b, c, d] = parts(q); - Thực hiện các phép toán: Matlab hỗ trợ nhiều phép toán trên quaternion, bao gồm cộng, trừ, nhân, và nghịch đảo. Ví dụ:
q_inv = inv(q); - Biểu diễn ma trận quay: Quaternion có thể được sử dụng để tạo các ma trận quay 3D, rất hữu ích trong đồ họa hoặc mô phỏng chuyển động. Sử dụng hàm
rotmatđể chuyển đổi quaternion thành ma trận quay:R = rotmat(q, 'frame');
Những bước trên giúp bạn làm quen với cách tạo và sử dụng quaternion trong Matlab, hỗ trợ xử lý và mô phỏng chuyển động phức tạp một cách hiệu quả.

3. Sự khác biệt giữa Quaternion và Ma trận Xoay
Trong các hệ thống điều khiển robot và đồ họa máy tính, quaternion và ma trận xoay là hai phương pháp được sử dụng để biểu diễn phép xoay 3D. Tuy nhiên, hai phương pháp này có sự khác biệt rõ rệt về cấu trúc và hiệu quả tính toán.
Về mặt biểu diễn, quaternion là một bộ gồm bốn phần tử \((w, x, y, z)\) đại diện cho một phép xoay duy nhất trong không gian ba chiều. Ngược lại, ma trận xoay được biểu diễn dưới dạng ma trận \(3 \times 3\), sử dụng để thực hiện các phép biến đổi tọa độ.
- Hiệu quả tính toán: Phép toán với quaternion thường hiệu quả hơn về mặt tốc độ và yêu cầu ít tài nguyên tính toán hơn so với ma trận xoay.
- Ổn định số học: Quaternion giúp tránh hiện tượng khóa gimbal (gimbal lock), một vấn đề mà ma trận xoay có thể gặp phải trong quá trình xoay liên tục.
- Khả năng nội suy: Quaternion rất phù hợp cho nội suy tuyến tính trên các phép xoay, đặc biệt là trong hoạt họa và đồ họa 3D, trong khi ma trận xoay khó xử lý việc này hơn.
Tuy nhiên, ma trận xoay vẫn có ưu điểm của mình, ví dụ như dễ dàng hiểu và thao tác trực tiếp trên các tọa độ và các vector không gian. Trong MATLAB, cả hai phương pháp đều có thể được sử dụng tùy thuộc vào mục đích và yêu cầu cụ thể.
Ví dụ, MATLAB cung cấp hàm quat2rotm để chuyển đổi từ quaternion sang ma trận xoay:
\[
\mathbf{R} = quat2rotm(\mathbf{q})
\]
Trong đó q là quaternion đầu vào và R là ma trận xoay tương ứng.

4. Ứng dụng của Quaternion trong đồ họa máy tính và lập trình game
Quaternion là một công cụ quan trọng trong đồ họa máy tính và lập trình game nhờ khả năng xử lý các phép xoay trong không gian 3D một cách hiệu quả và chính xác. Khác với ma trận xoay, Quaternion giúp tránh các hiện tượng như "gimbal lock" - tình trạng xảy ra khi các góc Euler bị khóa trong một số trục xoay nhất định.
1. Tối ưu hóa các phép xoay trong không gian 3D
Trong đồ họa 3D, Quaternion được sử dụng để thể hiện các phép xoay thông qua một vector không gian 4 chiều \((w, x, y, z)\). So với các cách biểu diễn khác như ma trận xoay hay góc Euler, Quaternion có ưu điểm là dễ dàng nội suy các phép xoay mà không làm mất mát dữ liệu hay gây ra hiện tượng biến dạng.
- Quaternion có thể được sử dụng để nội suy mượt mà giữa các góc xoay bằng phương pháp Spherical Linear Interpolation (SLERP).
- Trong game, SLERP giúp tạo ra những chuyển động mượt mà, đặc biệt là khi nhân vật hoặc vật thể chuyển hướng hoặc thay đổi góc nhìn.
2. Hiệu suất xử lý cao hơn
So với ma trận xoay, Quaternion có ít phần tử hơn (4 so với 9 của ma trận 3x3), do đó tiết kiệm tài nguyên tính toán trong quá trình xử lý đồ họa. Điều này giúp cải thiện hiệu suất, đặc biệt là trong các ứng dụng game cần xử lý hàng ngàn phép tính xoay cùng lúc.
3. Ứng dụng cụ thể trong lập trình game
- Trong Unity, Quaternion thường được sử dụng để quay các vật thể trong không gian 3D. Ví dụ, bạn có thể sử dụng hàm
Quaternion.RotateTowards()hoặcQuaternion.LookRotation()để điều khiển hướng di chuyển của nhân vật. - Trong Unreal Engine, Quaternion giúp điều chỉnh các chuyển động của camera và nhân vật một cách mượt mà, đặc biệt trong các game bắn súng góc nhìn thứ nhất.
4. Ứng dụng trong VR và AR
Quaternion còn đóng vai trò quan trọng trong thực tế ảo (VR) và thực tế tăng cường (AR), nơi mà việc theo dõi chuyển động và góc nhìn của người dùng là rất quan trọng. Nhờ tính ổn định và hiệu suất cao, Quaternion giúp đảm bảo trải nghiệm mượt mà, không giật lag.
5. Tổng kết
Nhờ khả năng xử lý các phép xoay một cách hiệu quả và tránh được các vấn đề của góc Euler, Quaternion trở thành một công cụ không thể thiếu trong đồ họa máy tính và lập trình game. Với ứng dụng rộng rãi từ các trò chơi điện tử đến VR và AR, việc hiểu và sử dụng Quaternion là kỹ năng quan trọng cho các nhà phát triển.

5. Ứng dụng của Quaternion trong robot học
Quaternion có ứng dụng rộng rãi trong lĩnh vực robot học, đặc biệt là khi xử lý các chuyển động và điều khiển robot trong không gian 3D. Bằng cách sử dụng Quaternion, các hệ thống điều khiển có thể thực hiện các phép xoay và biến đổi một cách mượt mà, chính xác mà không gặp phải các vấn đề của góc Euler như "gimbal lock".
1. Điều khiển và định hướng robot
Trong robot học, việc định hướng và điều khiển robot trong không gian 3D là một trong những thách thức lớn. Quaternion được sử dụng để biểu diễn tư thế (orientation) của robot trong không gian thông qua bốn giá trị \((q_0, q_1, q_2, q_3)\), tương ứng với các trục không gian.
- Quaternion giúp tránh hiện tượng "gimbal lock" và cung cấp khả năng điều khiển ổn định hơn.
- Trong các robot tự hành, việc sử dụng Quaternion giúp tối ưu hóa việc xác định hướng và vị trí của robot trong môi trường phức tạp.
2. Ứng dụng trong điều khiển cánh tay robot
Các hệ thống điều khiển cánh tay robot thường phải thực hiện các phép xoay phức tạp trong không gian nhiều chiều. Sử dụng Quaternion, cánh tay robot có thể thực hiện các chuyển động mượt mà mà không cần chuyển đổi qua nhiều hệ tọa độ khác nhau như khi sử dụng ma trận xoay.
- Trong Matlab, các phép toán liên quan đến Quaternion được hỗ trợ thông qua các hàm như
quat2rotm()vàrotm2quat(). - Điều này giúp cánh tay robot thực hiện các thao tác như gắp, thả hoặc hàn chi tiết với độ chính xác cao.
3. Ứng dụng trong robot bay và drone
Đối với các loại robot bay như drone, Quaternion là công cụ không thể thiếu để điều khiển hệ thống xoay 360 độ trong không gian. Điều này đảm bảo rằng drone có thể duy trì ổn định trong quá trình bay mà không gặp phải tình trạng mất kiểm soát.
- Trong robot bay, các thuật toán điều khiển sử dụng Quaternion để tính toán và dự đoán các góc xoay dựa trên dữ liệu từ cảm biến.
- Điều này giúp hệ thống ổn định và điều chỉnh nhanh chóng khi gặp các yếu tố ngoại cảnh như gió hoặc chướng ngại vật.
4. Tóm tắt
Nhờ tính hiệu quả và khả năng giải quyết các vấn đề xoay phức tạp, Quaternion là một trong những công cụ quan trọng nhất trong robot học. Từ điều khiển hướng di chuyển của robot tự hành, cho đến các ứng dụng trong robot bay và cánh tay robot, việc sử dụng Quaternion đã nâng cao hiệu suất và tính chính xác của hệ thống điều khiển.
XEM THÊM:
6. Các công cụ và thư viện hỗ trợ làm việc với Quaternion trong Matlab
Trong Matlab, có nhiều công cụ và thư viện hỗ trợ cho việc làm việc với Quaternion, giúp xử lý các phép toán xoay và biến đổi trong không gian 3D một cách dễ dàng. Dưới đây là một số công cụ phổ biến:
1. Aerospace Toolbox
Aerospace Toolbox là một công cụ mạnh mẽ giúp người dùng làm việc với các hệ tọa độ và phép biến đổi xoay, bao gồm hỗ trợ các hàm về Quaternion. Một số hàm quan trọng:
quat2rotm(q): Chuyển đổi một quaternion \( q \) thành ma trận xoay.rotm2quat(R): Chuyển đổi một ma trận xoay \( R \) thành quaternion.quatmultiply(q1, q2): Nhân hai quaternion \( q_1 \) và \( q_2 \).quatinv(q): Tính toán nghịch đảo của một quaternion \( q \).
2. Robotics System Toolbox
Robotics System Toolbox cung cấp các hàm chuyên dụng để điều khiển và mô phỏng các hệ thống robot, bao gồm các công cụ làm việc với quaternion:
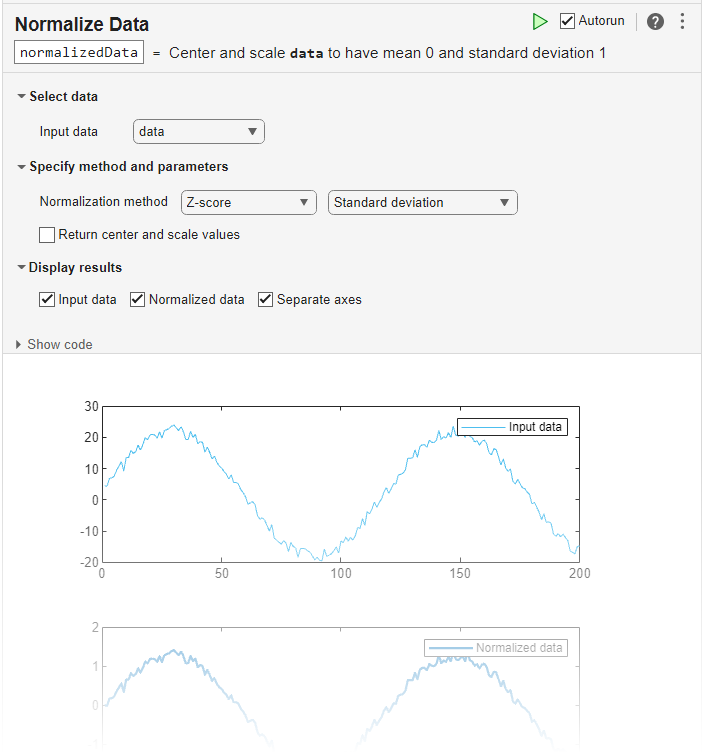
quatnormalize(q): Chuẩn hóa quaternion \( q \) để đảm bảo độ dài bằng 1.eul2quat(eul): Chuyển đổi các góc Euler \( eul \) thành quaternion.tform2quat(T): Chuyển đổi từ ma trận biến đổi đồng nhất \( T \) sang quaternion.
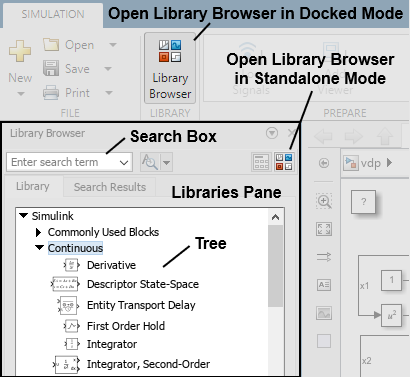
3. Simulink 3D Animation
Simulink 3D Animation hỗ trợ việc mô phỏng các hệ thống xoay và chuyển động trong không gian 3D, sử dụng quaternion để tính toán các phép xoay:
- Hỗ trợ visualizing 3D chuyển động sử dụng quaternion cho các mô hình robot và máy bay.
- Tích hợp dễ dàng với các mô hình Simulink, giúp theo dõi và phân tích chuyển động của các hệ thống động lực học.
4. Matlab File Exchange
Trên Matlab File Exchange, cộng đồng Matlab chia sẻ rất nhiều thư viện và công cụ bổ sung để làm việc với quaternion. Bạn có thể tìm thấy các mã nguồn mở về:
- Các phép toán quaternion nâng cao.
- Thuật toán tối ưu hóa và mô phỏng chuyển động sử dụng quaternion.
- Visualizing các biến đổi trong không gian 3D với hỗ trợ quaternion.
5. Tóm tắt
Với sự hỗ trợ của các công cụ và thư viện mạnh mẽ trong Matlab, người dùng có thể dễ dàng xử lý và mô phỏng các hệ thống sử dụng quaternion trong các ứng dụng từ đồ họa máy tính, robot học đến mô phỏng không gian 3D.
7. Tổng kết
Việc sử dụng Quaternion trong Matlab không chỉ mang lại lợi ích vượt trội trong các phép tính toán học mà còn giúp giải quyết các bài toán xoay 3D phức tạp một cách hiệu quả hơn so với các phương pháp truyền thống như ma trận xoay. Nhờ khả năng giảm thiểu các sai số trong phép tính xoay liên tục, Quaternion đã trở thành công cụ không thể thiếu trong các lĩnh vực như robot học, đồ họa máy tính và điều hướng.
Dưới đây là những lợi ích chính của việc sử dụng Quaternion trong tính toán không gian 3D:
- Loại bỏ hiện tượng "gimbal lock" - một vấn đề thường gặp khi sử dụng ma trận xoay.
- Dễ dàng hơn trong việc tính toán các phép toán xoay phức tạp và giảm thiểu sai số tính toán.
- Quaternion cho phép lưu trữ và truyền tải thông tin xoay trong không gian 3D một cách hiệu quả hơn với ít bộ nhớ hơn.
Các xu hướng nghiên cứu hiện nay về Quaternion trong Matlab đang mở rộng ứng dụng của chúng trong nhiều lĩnh vực khác nhau. Một số nghiên cứu mới nhất tập trung vào:
- Ứng dụng trong điều khiển robot và máy bay không người lái, giúp tăng độ chính xác trong điều hướng và xoay chuyển động.
- Phát triển các thư viện toán học tối ưu hơn trong Matlab để xử lý các phép tính Quaternion nhanh hơn và chính xác hơn.
- Mở rộng ứng dụng trong lĩnh vực thực tế ảo và tăng cường (VR/AR), nơi các phép toán xoay đóng vai trò quan trọng trong trải nghiệm người dùng.
Nhìn chung, việc sử dụng Quaternion không chỉ cải thiện hiệu quả của các hệ thống tính toán mà còn mở ra nhiều hướng nghiên cứu mới trong các lĩnh vực kỹ thuật và khoa học, đặc biệt trong bối cảnh công nghệ không gian 3D ngày càng phát triển mạnh mẽ.











 Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender
Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render
Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật
D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả
Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật
VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu
Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả
Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích
Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích "Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng
"Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử
Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp
Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành
Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng
Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024
Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024