Chủ đề lập trình matlab điều khiển cánh tay robot: Lập trình Matlab điều khiển cánh tay robot mang đến những giải pháp tối ưu trong lĩnh vực tự động hóa. Với khả năng điều khiển chính xác và linh hoạt, lập trình Matlab hỗ trợ việc phát triển các hệ thống robot trong công nghiệp, y tế và nhiều lĩnh vực khác. Bài viết này sẽ cung cấp cái nhìn toàn diện về lập trình Matlab điều khiển cánh tay robot, từ cơ bản đến chuyên sâu.
Mục lục
- Lập Trình Matlab Điều Khiển Cánh Tay Robot
- 1. Giới Thiệu Về Lập Trình Matlab Điều Khiển Cánh Tay Robot
- 2. Các Phương Pháp Điều Khiển Cánh Tay Robot Bằng Matlab
- 3. Mô Phỏng Và Tối Ưu Hóa Điều Khiển Robot Bằng Matlab
- 4. Các Ứng Dụng Thực Tiễn Của Cánh Tay Robot
- 5. Cách Thiết Kế Và Phát Triển Hệ Thống Điều Khiển Robot
- 6. Tài Liệu Học Tập Và Nguồn Tham Khảo
Lập Trình Matlab Điều Khiển Cánh Tay Robot
Lập trình Matlab điều khiển cánh tay robot là một ứng dụng quan trọng trong lĩnh vực tự động hóa và kỹ thuật robot. Nó cho phép người sử dụng thiết kế và kiểm soát chuyển động của các robot một cách chính xác, đồng thời áp dụng các giải thuật điều khiển tiên tiến.
1. Giới Thiệu Về Điều Khiển Cánh Tay Robot Bằng Matlab
Matlab là một công cụ mạnh mẽ được sử dụng để mô phỏng và thiết kế các hệ thống điều khiển. Khi lập trình điều khiển cánh tay robot, Matlab thường được kết hợp với Simulink để mô hình hóa các hệ thống động học, từ đó giúp người dùng kiểm soát các chuyển động phức tạp của robot.
- Ứng dụng trong nghiên cứu và giảng dạy kỹ thuật điều khiển tự động
- Phát triển các giải thuật điều khiển robot như PID, Fuzzy, hoặc điều khiển trượt
- Tăng cường độ chính xác và ổn định của hệ thống điều khiển
2. Các Phương Pháp Điều Khiển Thông Dụng
Trong việc điều khiển cánh tay robot, các phương pháp điều khiển phổ biến bao gồm:
- Điều Khiển PID: Sử dụng bộ điều khiển tỉ lệ, tích phân, vi phân (PID) để đảm bảo các chuyển động của cánh tay robot đạt được độ chính xác cao.
- Điều Khiển Mờ: Sử dụng logic mờ để điều chỉnh các thông số điều khiển, thích nghi với các thay đổi môi trường hoặc tải trọng.
- Điều Khiển Trượt: Phương pháp này sử dụng mặt trượt để kiểm soát các chuyển động phi tuyến tính của cánh tay robot, đảm bảo hệ thống vận hành ổn định.
3. Các Bước Lập Trình Điều Khiển Cánh Tay Robot
Quá trình lập trình điều khiển cánh tay robot bao gồm các bước sau:
- Xây dựng mô hình toán học cho cánh tay robot, bao gồm động học và động lực học
- Sử dụng Matlab để mô phỏng các phương trình chuyển động và tính toán các thông số cần thiết
- Thiết kế bộ điều khiển dựa trên các giải thuật như PID, mờ, hoặc điều khiển trượt
- Kiểm tra và hiệu chỉnh mô phỏng để đảm bảo hệ thống vận hành đúng như mong đợi
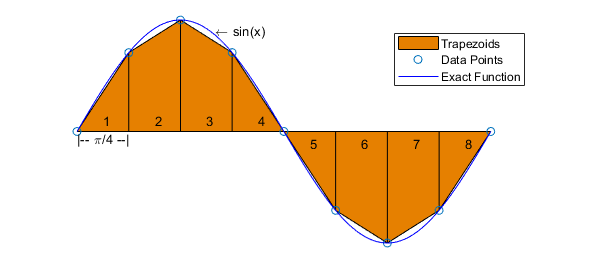
4. Ví Dụ Minh Họa Bằng Matlab
Dưới đây là một ví dụ đơn giản sử dụng Matlab để điều khiển một cánh tay robot với hai bậc tự do:
Mô hình toán học của cánh tay robot được biểu diễn bởi hệ phương trình chuyển động:
Trong đó:
- \(M(\theta)\) là ma trận khối lượng của cánh tay robot
- \(C(\theta, \dot{\theta})\) là ma trận lực Coriolis và lực ly tâm
- \(G(\theta)\) là véc tơ trọng lực
- \(\tau\) là véc tơ mô-men xoắn điều khiển
5. Ứng Dụng Thực Tiễn
Việc lập trình Matlab điều khiển cánh tay robot có nhiều ứng dụng thực tiễn trong công nghiệp và nghiên cứu, bao gồm:
- Tự động hóa dây chuyền sản xuất trong nhà máy
- Sử dụng robot để thực hiện các nhiệm vụ chính xác trong môi trường nguy hiểm
- Phát triển các robot phục vụ trong y tế, như cánh tay robot hỗ trợ phẫu thuật
6. Kết Luận
Lập trình Matlab điều khiển cánh tay robot không chỉ là một công cụ mạnh mẽ cho các kỹ sư và nhà nghiên cứu mà còn mở ra nhiều cơ hội phát triển trong các lĩnh vực công nghiệp và y tế. Các phương pháp điều khiển hiện đại như PID, mờ, và điều khiển trượt cung cấp giải pháp tối ưu cho việc điều khiển các hệ thống robot phức tạp.

.png)
1. Giới Thiệu Về Lập Trình Matlab Điều Khiển Cánh Tay Robot
Lập trình Matlab là một công cụ mạnh mẽ để phát triển và điều khiển các hệ thống robot, đặc biệt là cánh tay robot. Với khả năng tính toán mạnh mẽ và các thư viện hỗ trợ chuyên sâu, Matlab giúp lập trình viên dễ dàng tạo ra các thuật toán điều khiển và mô phỏng chính xác.
Cánh tay robot là một phần không thể thiếu trong công nghiệp tự động hóa và nhiều lĩnh vực khác như y tế và nghiên cứu. Thông qua việc sử dụng Matlab, các hệ thống điều khiển cánh tay robot có thể đạt được độ chính xác cao trong điều hướng và thao tác.
- Cấu trúc cơ bản: Cánh tay robot bao gồm các khớp và động cơ giúp di chuyển và thao tác. Matlab cho phép lập trình và mô phỏng các chuyển động của cánh tay này.
- Thư viện điều khiển: Matlab cung cấp nhiều thư viện hỗ trợ, như Control System Toolbox, giúp thiết kế các hệ thống điều khiển tự động cho robot.
- Mô phỏng và kiểm tra: Với Simulink, lập trình viên có thể mô phỏng các bài toán điều khiển để kiểm tra hiệu suất và tối ưu hóa hệ thống.
Lập trình Matlab điều khiển cánh tay robot không chỉ giúp nâng cao hiệu suất mà còn tạo ra những hệ thống an toàn và đáng tin cậy hơn, đặc biệt trong các môi trường yêu cầu độ chính xác cao.
| Công dụng | Ưu điểm |
| Điều khiển chính xác các thao tác robot | Độ chính xác cao, mô phỏng hiệu quả |
| Mô phỏng các tình huống phức tạp | Tiết kiệm thời gian và chi phí |
2. Các Phương Pháp Điều Khiển Cánh Tay Robot Bằng Matlab
Có nhiều phương pháp điều khiển cánh tay robot bằng Matlab, mỗi phương pháp đều có ưu và nhược điểm riêng, phù hợp với các yêu cầu điều khiển khác nhau. Dưới đây là một số phương pháp phổ biến thường được sử dụng:
- Phương pháp điều khiển PID (Proportional-Integral-Derivative):
Phương pháp PID là một trong những kỹ thuật điều khiển phổ biến nhất trong điều khiển tự động. Bằng cách điều chỉnh ba tham số \(P\), \(I\), và \(D\), hệ thống điều khiển có thể duy trì ổn định và đạt độ chính xác cao trong việc di chuyển các khớp của cánh tay robot.
- Điều khiển mờ (Fuzzy Logic Control):
Đối với các hệ thống không tuyến tính hoặc có nhiều yếu tố không xác định, phương pháp điều khiển mờ là một lựa chọn hiệu quả. Matlab cung cấp các công cụ hỗ trợ để thiết kế hệ thống điều khiển mờ, giúp robot hoạt động linh hoạt hơn trong môi trường phức tạp.
- Điều khiển thích nghi (Adaptive Control):
Phương pháp điều khiển thích nghi cho phép hệ thống tự động điều chỉnh các thông số điều khiển trong quá trình vận hành. Điều này rất quan trọng khi cánh tay robot phải thực hiện các nhiệm vụ khác nhau trong các điều kiện thay đổi.
- Điều khiển dự đoán mô hình (Model Predictive Control - MPC):
MPC là một phương pháp điều khiển nâng cao, sử dụng các mô hình toán học để dự đoán hành vi của hệ thống trong tương lai và tối ưu hóa các hành động điều khiển. Matlab cung cấp công cụ MPC Toolbox để thiết kế và mô phỏng các hệ thống điều khiển dự đoán.
| Phương pháp | Ưu điểm | Nhược điểm |
| PID | Đơn giản, dễ áp dụng | Cần tinh chỉnh thủ công các tham số |
| Fuzzy Logic | Phù hợp với hệ thống không tuyến tính | Khó thiết kế và điều chỉnh |
| Adaptive Control | Tự động điều chỉnh theo điều kiện | Phức tạp, yêu cầu tính toán cao |
| MPC | Tối ưu hóa hành vi hệ thống | Cần mô hình chính xác, tính toán nặng |

3. Mô Phỏng Và Tối Ưu Hóa Điều Khiển Robot Bằng Matlab
Matlab là công cụ mạnh mẽ cho phép thực hiện các mô phỏng và tối ưu hóa điều khiển cánh tay robot một cách chính xác và hiệu quả. Quy trình mô phỏng không chỉ giúp kiểm tra hiệu suất của hệ thống điều khiển mà còn hỗ trợ tối ưu hóa các tham số điều khiển để cải thiện tính ổn định và hiệu năng của robot. Dưới đây là các bước chính để mô phỏng và tối ưu hóa:
- Xây dựng mô hình toán học của robot:
Để mô phỏng, trước tiên cần phải có mô hình toán học của hệ thống. Matlab hỗ trợ xây dựng các mô hình động học và động lực học của cánh tay robot bằng cách sử dụng các hàm và công cụ như Simulink. Các phương trình chuyển động có thể được biểu diễn dưới dạng \[M(q)\ddot{q} + C(q, \dot{q})\dot{q} + G(q) = \tau\], trong đó \(q\) là tọa độ khớp, \(M(q)\) là ma trận quán tính, và \(\tau\) là mô-men xoắn tác dụng lên các khớp.
- Thiết kế hệ thống điều khiển:
Sau khi có mô hình toán học, các kỹ thuật điều khiển như PID, điều khiển mờ (Fuzzy), hoặc MPC có thể được áp dụng. Matlab cung cấp các công cụ mạnh mẽ để thiết kế và mô phỏng hệ thống điều khiển. Việc tinh chỉnh các tham số điều khiển như \(K_p\), \(K_i\), và \(K_d\) có thể thực hiện thông qua các công cụ như Control System Toolbox.
- Mô phỏng hệ thống điều khiển:
Sử dụng Simulink để mô phỏng hoạt động của hệ thống điều khiển trong các điều kiện hoạt động khác nhau. Simulink cho phép trực quan hóa chuyển động của cánh tay robot cũng như các biến điều khiển trong thời gian thực, giúp đánh giá hiệu suất và phát hiện các vấn đề tiềm ẩn trong thiết kế điều khiển.
- Tối ưu hóa tham số điều khiển:
Quá trình tối ưu hóa nhằm tìm ra các giá trị tham số điều khiển tốt nhất để cải thiện hiệu năng của robot. Matlab cung cấp các công cụ như Optimization Toolbox để giải quyết các bài toán tối ưu hóa, giúp tăng cường độ chính xác và tính ổn định của hệ thống.
- Kiểm tra và hiệu chỉnh:
Sau khi hoàn thành mô phỏng và tối ưu hóa, cần kiểm tra lại các điều kiện biên và hiệu chỉnh hệ thống nếu cần. Việc này đảm bảo rằng hệ thống hoạt động ổn định và hiệu quả trong mọi tình huống thực tế.
Nhờ vào các công cụ mạnh mẽ của Matlab và Simulink, quy trình mô phỏng và tối ưu hóa điều khiển cánh tay robot có thể thực hiện nhanh chóng và chính xác, giúp các kỹ sư đạt được hiệu quả cao trong thiết kế và triển khai hệ thống điều khiển.

4. Các Ứng Dụng Thực Tiễn Của Cánh Tay Robot
Cánh tay robot hiện nay đang được ứng dụng rộng rãi trong nhiều lĩnh vực, từ sản xuất công nghiệp đến y tế và giáo dục. Sự linh hoạt và độ chính xác cao của cánh tay robot giúp tăng hiệu quả công việc, giảm thiểu sai sót và tiết kiệm chi phí. Dưới đây là một số ứng dụng tiêu biểu của cánh tay robot trong thực tiễn:
- Ứng dụng trong sản xuất công nghiệp:
Cánh tay robot được sử dụng phổ biến trong các dây chuyền sản xuất tự động hóa. Chúng có khả năng thực hiện các thao tác như hàn, lắp ráp, sơn, và đóng gói một cách nhanh chóng và chính xác. Các robot này có thể vận hành liên tục, giúp tăng năng suất và giảm thời gian hoàn thành sản phẩm.
- Ứng dụng trong y tế:
Cánh tay robot cũng đóng vai trò quan trọng trong phẫu thuật, đặc biệt là trong các ca phẫu thuật nội soi. Chúng giúp thực hiện các thao tác chính xác đến từng milimet, giảm rủi ro cho bệnh nhân và đẩy nhanh quá trình phục hồi. Các hệ thống robot như Da Vinci đã chứng minh hiệu quả của robot trong y học hiện đại.
- Ứng dụng trong giáo dục và nghiên cứu:
Các trường đại học và viện nghiên cứu sử dụng cánh tay robot để nghiên cứu về điều khiển tự động, trí tuệ nhân tạo, và tối ưu hóa hệ thống. Matlab là một công cụ mạnh mẽ giúp lập trình và mô phỏng các hệ thống robot này, hỗ trợ việc giảng dạy và thực hành cho sinh viên.
- Ứng dụng trong không gian:
Trong lĩnh vực không gian, các cánh tay robot được sử dụng để thực hiện các nhiệm vụ trên tàu vũ trụ, như lắp ráp các bộ phận hoặc thu thập mẫu từ bề mặt hành tinh. Robot Curiosity của NASA đã sử dụng cánh tay robot để thực hiện các nhiệm vụ trên Sao Hỏa.
- Ứng dụng trong nông nghiệp:
Các cánh tay robot đang dần trở thành một phần không thể thiếu trong ngành nông nghiệp, với các nhiệm vụ như thu hoạch, phun thuốc và xử lý cây trồng. Nhờ vào sự chính xác và tự động hóa, chúng giúp tối ưu hóa quá trình sản xuất nông nghiệp.
Với sự phát triển nhanh chóng của công nghệ, các ứng dụng của cánh tay robot ngày càng được mở rộng và nâng cao, giúp cải thiện chất lượng cuộc sống và hiệu quả làm việc trong nhiều lĩnh vực.

5. Cách Thiết Kế Và Phát Triển Hệ Thống Điều Khiển Robot
Việc thiết kế và phát triển hệ thống điều khiển cho cánh tay robot là một quá trình phức tạp, yêu cầu sự kết hợp giữa phần mềm và phần cứng. Matlab là một công cụ mạnh mẽ, hỗ trợ mô phỏng và lập trình hệ thống điều khiển. Các bước cơ bản trong việc thiết kế và phát triển hệ thống điều khiển robot bao gồm:
- Xác định yêu cầu của hệ thống:
Bước đầu tiên là xác định các yêu cầu chính của hệ thống, bao gồm độ chính xác, tốc độ, và khả năng chịu tải của cánh tay robot. Các thông số kỹ thuật này giúp định hình kiến trúc tổng thể của hệ thống điều khiển.
- Thiết kế mô hình động học và động lực học:
Một trong những bước quan trọng là xây dựng mô hình động học và động lực học cho robot. Matlab có các công cụ như Simulink hỗ trợ việc tạo ra các mô hình này để mô phỏng các chuyển động và lực tác động lên các khớp của robot.
- Phát triển thuật toán điều khiển:
Tiếp theo, cần phát triển các thuật toán điều khiển như PID, LQR hoặc các phương pháp điều khiển hiện đại hơn như điều khiển thích nghi hoặc điều khiển dựa trên mô hình dự đoán. Các thuật toán này sẽ đảm bảo cánh tay robot hoạt động đúng như mong muốn.
- Mô phỏng và kiểm tra:
Sau khi thiết kế các thuật toán, tiến hành mô phỏng trên Matlab để kiểm tra tính ổn định và hiệu suất của hệ thống. Mô phỏng giúp phát hiện các vấn đề tiềm ẩn trước khi triển khai hệ thống thực tế.
- Triển khai và hiệu chỉnh:
Cuối cùng, hệ thống được triển khai lên phần cứng. Quá trình này bao gồm việc tích hợp các cảm biến và bộ truyền động, sau đó hiệu chỉnh các thông số để đảm bảo hiệu suất tối ưu.
Bằng việc sử dụng Matlab kết hợp với các kỹ thuật lập trình tiên tiến, việc phát triển hệ thống điều khiển cho robot trở nên linh hoạt và hiệu quả, giúp đạt được kết quả tốt nhất trong các ứng dụng thực tiễn.
XEM THÊM:
6. Tài Liệu Học Tập Và Nguồn Tham Khảo
Dưới đây là một số tài liệu và nguồn tham khảo hữu ích giúp bạn nắm vững kiến thức về lập trình Matlab và điều khiển cánh tay robot.
6.1 Sách Về Lập Trình Matlab
- "MATLAB Programming for Biomedical Engineers and Scientists" - Cuốn sách này cung cấp cái nhìn toàn diện về lập trình Matlab, ứng dụng trong khoa học kỹ thuật, bao gồm cả điều khiển robot.
- "Robot Modeling and Control" - Sách này giải thích các khái niệm về mô hình hóa và điều khiển robot, bao gồm điều khiển bằng Matlab.
- "MATLAB for Engineers" - Sách hướng dẫn chi tiết về lập trình Matlab từ cơ bản đến nâng cao, giúp phát triển các thuật toán điều khiển robot.
6.2 Tài Liệu Tham Khảo Về Điều Khiển Robot
- Tài liệu từ các khóa học trực tuyến về điều khiển robot - Các khóa học này cung cấp lý thuyết và thực hành sử dụng Matlab trong điều khiển cánh tay robot, bao gồm việc sử dụng các phương pháp như PID, điều khiển mờ, và mô phỏng bằng Simulink.
- Trang web MathWorks - Cung cấp tài liệu chính thức về lập trình Matlab và các ứng dụng trong robot học, từ mô hình hóa động học đến điều khiển robot phức tạp.
6.3 Khóa Học Online Về Lập Trình Matlab
- Khóa học trên Coursera - Coursera cung cấp nhiều khóa học về lập trình Matlab, tập trung vào điều khiển robot và ứng dụng trong các lĩnh vực kỹ thuật khác.
- Khóa học trên Udemy - Udemy có các khóa học về Matlab và Simulink giúp bạn thực hành điều khiển robot qua các ví dụ thực tế.
- MathWorks Training - Trang chủ MathWorks cung cấp nhiều khóa học online và tài liệu đào tạo về lập trình Matlab và các công cụ điều khiển robot chuyên nghiệp.
Việc tham khảo các nguồn tài liệu và khóa học trên sẽ giúp bạn xây dựng nền tảng kiến thức vững chắc về lập trình Matlab và điều khiển robot, từ cơ bản đến nâng cao, đồng thời phát triển khả năng tự học và áp dụng trong các dự án thực tế.













 Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender
Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render
Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật
D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả
Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật
VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu
Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả
Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích
Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích "Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng
"Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử
Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp
Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành
Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng
Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024
Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024