Chủ đề l298n tinkercad: Bài viết này cung cấp một hướng dẫn chi tiết về cách sử dụng mô-đun L298N trong Tinkercad để điều khiển động cơ DC và động cơ bước cùng với Arduino. Bạn sẽ khám phá cách kết nối, cấu hình và lập trình mô-đun L298N để thực hiện các dự án điều khiển động cơ linh hoạt và hiệu quả. Phù hợp cho người mới bắt đầu và những người đam mê DIY, bài viết này là bước khởi đầu hoàn hảo để bạn làm quen với các nguyên tắc điều khiển động cơ qua Arduino trong môi trường mô phỏng Tinkercad.
Mục lục
- 1. Giới thiệu về L298N và Ứng dụng trong Tinkercad
- 2. Thiết lập Cơ Bản L298N trong Tinkercad
- 3. Điều Khiển Động Cơ Một Chiều (DC) bằng L298N
- 4. Điều Khiển Động Cơ Bước bằng L298N
- 5. Tạo Dự Án Điều Khiển H-Bridge với L298N trong Tinkercad
- 6. Lập Trình Arduino và Điều Khiển Động Cơ với L298N
- 7. Các Dự Án Thực Tế với L298N và Tinkercad
- 8. Lợi Ích và Ứng Dụng của Mô phỏng Tinkercad trong Học tập và Thực hành
1. Giới thiệu về L298N và Ứng dụng trong Tinkercad
L298N là một mô-đun cầu H phổ biến được sử dụng để điều khiển động cơ DC và động cơ bước trong các dự án điện tử. Cầu H cho phép người dùng điều khiển hướng quay và tốc độ của động cơ bằng cách thay đổi dòng điện qua các chân điều khiển. Điều này rất quan trọng trong các ứng dụng như robot tự hành và các hệ thống tự động, nơi cần độ chính xác trong điều khiển động cơ.
Trong Tinkercad, mô phỏng của L298N giúp người dùng dễ dàng thử nghiệm các sơ đồ điều khiển động cơ mà không cần phần cứng thực tế. Tinkercad cung cấp một môi trường trực quan, cho phép người học và người dùng dễ dàng điều chỉnh kết nối và thử nghiệm các phương pháp điều khiển động cơ khác nhau.
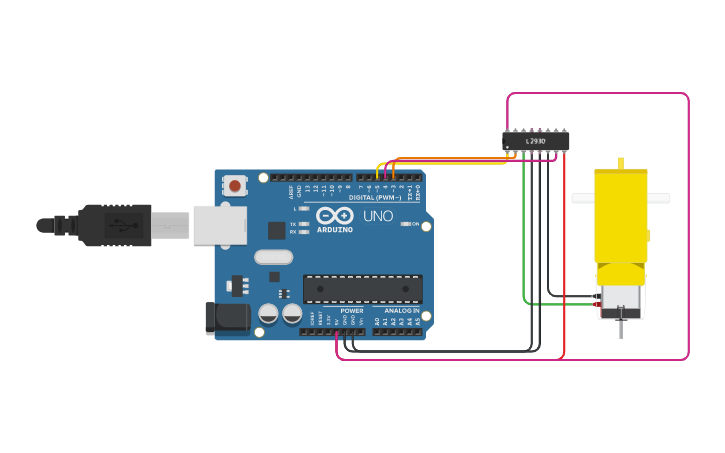
- Kết nối cơ bản của L298N: L298N có 4 chân đầu vào điều khiển (IN1, IN2, IN3, IN4), hai chân nguồn cho động cơ (OUT1 và OUT2 cho động cơ A, OUT3 và OUT4 cho động cơ B), và một chân nguồn chính (Vcc) cho toàn bộ module. Trong các mô phỏng trên Tinkercad, các kết nối này có thể được điều chỉnh để điều khiển hướng quay của động cơ bằng cách thay đổi trạng thái của các chân IN.
- Điều khiển động cơ DC: Bằng cách thay đổi trạng thái của các chân IN1 và IN2, ta có thể điều chỉnh động cơ DC theo chiều thuận hoặc ngược. Trong Tinkercad, người dùng có thể lập trình các trạng thái này để tạo các thao tác quay mong muốn.
- Ứng dụng trong điều khiển động cơ bước: Động cơ bước có thể được điều khiển bằng L298N bằng cách kích hoạt lần lượt các chân IN theo trình tự nhất định, tạo ra các bước quay với độ chính xác cao. Tinkercad hỗ trợ mô phỏng các chuỗi kích hoạt này, cho phép người dùng quan sát chuyển động từng bước của động cơ.
Với Tinkercad, việc tìm hiểu và làm quen với L298N trở nên dễ dàng hơn, đặc biệt với các bạn mới bắt đầu học về điện tử và lập trình điều khiển động cơ. Các mô phỏng cho phép thử nghiệm mà không rủi ro về phần cứng và tạo điều kiện cho việc sáng tạo các dự án độc đáo và phong phú.
.png)
2. Thiết lập Cơ Bản L298N trong Tinkercad
Thiết lập cơ bản mô-đun L298N trong Tinkercad giúp điều khiển động cơ DC và bước từ các mô phỏng mạch trên nền tảng này. L298N là bộ cầu H hai chiều, cho phép điều khiển chiều quay của động cơ một cách linh hoạt. Dưới đây là các bước cơ bản để thiết lập L298N trong Tinkercad.
-
Kết nối nguồn: Gắn chân
VCCcủa L298N vào nguồn 5V hoặc 12V tùy theo yêu cầu của động cơ và nối chânGNDvào mạch chung. -
Kết nối động cơ: Gắn hai chân động cơ DC vào hai chân đầu ra của L298N (OUT1 và OUT2 cho động cơ thứ nhất, hoặc OUT3 và OUT4 cho động cơ thứ hai).
-
Kết nối điều khiển: Kết nối các chân điều khiển của L298N (IN1, IN2 cho động cơ thứ nhất, hoặc IN3, IN4 cho động cơ thứ hai) vào các chân tín hiệu trên Arduino hoặc nguồn điều khiển tín hiệu khác.
-
Cài đặt chân điều chỉnh: Chân
EN1vàEN2được sử dụng để điều chỉnh tốc độ động cơ. Gắn các chân này vào nguồn hoặc bộ điều khiển PWM để kiểm soát tốc độ động cơ. -
Kiểm tra và mô phỏng: Sau khi hoàn thành kết nối, sử dụng Tinkercad để chạy mô phỏng và điều chỉnh các thông số cần thiết, kiểm tra các chiều quay và tốc độ động cơ. Mô phỏng này hỗ trợ bạn tinh chỉnh thiết kế mà không cần phần cứng thực tế.
Bằng cách hoàn thành các kết nối cơ bản trên, bạn sẽ có thể điều khiển hiệu quả động cơ trong các ứng dụng với L298N trên Tinkercad, cho phép mô phỏng chính xác trước khi triển khai thực tế.
3. Điều Khiển Động Cơ Một Chiều (DC) bằng L298N
Để điều khiển động cơ DC bằng module L298N trong Tinkercad, chúng ta cần sử dụng các chân điều khiển trên L298N để thay đổi hướng quay và tốc độ của động cơ một cách linh hoạt. Dưới đây là hướng dẫn chi tiết từng bước.
- Bước 1: Kết nối các linh kiện cần thiết
- L298N: Module điều khiển với mạch cầu H hỗ trợ điều khiển động cơ hai chiều.
- Động cơ DC: Được kết nối với các chân
OUT1vàOUT2trên L298N. - Arduino: Sử dụng để cung cấp tín hiệu điều khiển đến các chân
IN1,IN2vàENAcủa L298N. - Nguồn điện: Cấp điện áp 9-12V cho động cơ qua chân
VSvà kết nối GND với cả Arduino và L298N.
- Bước 2: Điều khiển hướng quay của động cơ
Để điều khiển hướng quay, bạn cần điều chỉnh logic mức cao hoặc thấp trên các chân
IN1vàIN2:IN1 IN2 Hướng quay THẤP CAO Tiến CAO THẤP Lùi THẤP THẤP Dừng - Bước 3: Điều khiển tốc độ động cơ bằng PWM
Để điều chỉnh tốc độ, bạn cần sử dụng chân
ENAcủa L298N kết hợp với tín hiệu PWM từ Arduino. Tín hiệu này sẽ thay đổi tốc độ động cơ từ mức 0 (dừng) đến 255 (tối đa).Ví dụ: Để đặt tốc độ động cơ ở mức trung bình, bạn có thể sử dụng mã Arduino như sau:
analogWrite(ENA, 128); // Đặt tốc độ ở mức trung bình - Bước 4: Viết mã điều khiển động cơ trên Arduino
Dưới đây là đoạn mã mẫu cho Arduino để điều khiển động cơ quay tiến hoặc lùi:
#define IN1 6 #define IN2 7 #define ENA 9 void setup() { pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); pinMode(ENA, OUTPUT); } void loop() { digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); analogWrite(ENA, 200); // Tốc độ quay nhanh delay(2000); digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); analogWrite(ENA, 100); // Tốc độ quay chậm delay(2000); }
Với các bước trên, bạn có thể thiết lập và điều khiển động cơ DC thông qua L298N trong Tinkercad, từ điều chỉnh hướng quay cho đến kiểm soát tốc độ linh hoạt bằng Arduino.

4. Điều Khiển Động Cơ Bước bằng L298N
Động cơ bước là loại động cơ quay theo các bước nhỏ và chính xác, giúp dễ dàng kiểm soát vị trí, tốc độ và hướng quay. Để điều khiển động cơ bước bằng L298N trong Tinkercad, bạn có thể làm theo các bước sau:
-
Kết nối nguồn: Nối chân
VCCcủa động cơ bước với chânVScủa module L298N để cung cấp nguồn điện cho động cơ. ChânGNDtrên module cũng cần nối với GND của Arduino để hoàn thiện mạch. -
Chân điều khiển: Động cơ bước thường được điều khiển qua 4 cuộn dây, tương ứng với 4 chân đầu vào của L298N:
IN1vàIN2: điều khiển cuộn dây đầu tiên của động cơ bước.IN3vàIN4: điều khiển cuộn dây thứ hai của động cơ bước.
-
Chân tốc độ: Sử dụng chân
ENAvàENBđể điều khiển tốc độ của động cơ. Trong Tinkercad, nếu bạn cần điều chỉnh tốc độ, hãy kết nối chân này với các chân PWM trên Arduino. -
Điều khiển bước quay: Để động cơ bước quay đúng hướng, cần đặt các tín hiệu điều khiển lần lượt cho
IN1đếnIN4theo một chuỗi hợp lý. Một ví dụ đơn giản để xoay động cơ bước 90° có thể là:Lần lượt IN1 IN2 IN3 IN4 Bước 1 1 0 1 0 Bước 2 0 1 1 0 Bước 3 0 1 0 1 Bước 4 1 0 0 1 Tiếp tục lặp lại chuỗi này để động cơ quay đều. Bạn cũng có thể thay đổi thứ tự các bước để đảo ngược hướng quay.
-
Chạy chương trình: Viết chương trình trên Arduino IDE để điều khiển các chân này theo chuỗi bước mong muốn và tải lên Arduino. Từ đó, bạn có thể điều chỉnh số vòng quay và hướng của động cơ một cách dễ dàng.
Với việc thiết lập đơn giản này, bạn có thể điều khiển động cơ bước với độ chính xác cao cho các ứng dụng như điều hướng robot, cánh tay robot, và nhiều thiết bị khác yêu cầu sự chính xác.
5. Tạo Dự Án Điều Khiển H-Bridge với L298N trong Tinkercad
Trong dự án này, chúng ta sẽ học cách điều khiển động cơ bằng mạch cầu H của module L298N trong Tinkercad. Đây là một phương pháp phổ biến để điều khiển cả hướng quay và tốc độ động cơ, giúp chúng ta dễ dàng tạo ra các mô hình xe tự hành hoặc robot di chuyển. Các bước thực hiện như sau:
-
Kết nối phần cứng:
- Nối chân
VCCcủa L298N vào cực dương nguồn 6V, chânGNDvào cực âm. - Chân
OUT1vàOUT2của L298N nối với động cơ bên phải, chânOUT3vàOUT4nối với động cơ bên trái. - Các chân
IN1,IN2,IN3, vàIN4của L298N được kết nối với các chân điều khiển trên Arduino (thường là chân 2, 3, 4, 5) để điều chỉnh hướng quay. - Chân
ENAvàENBđược nối với chân PWM trên Arduino (chân 9 và 10) để kiểm soát tốc độ động cơ.
- Nối chân
-
Viết code điều khiển:
Trong phần này, chúng ta sẽ viết mã để điều khiển hướng và tốc độ của động cơ thông qua các tín hiệu logic:
int dir1PinA = 2; int dir2PinA = 3; int speedPinA = 9; int dir1PinB = 4; int dir2PinB = 5; int speedPinB = 10; void setup() { pinMode(dir1PinA, OUTPUT); pinMode(dir2PinA, OUTPUT); pinMode(speedPinA, OUTPUT); pinMode(dir1PinB, OUTPUT); pinMode(dir2PinB, OUTPUT); pinMode(speedPinB, OUTPUT); } void loop() { // Động cơ tiến digitalWrite(dir1PinA, HIGH); digitalWrite(dir2PinA, LOW); analogWrite(speedPinA, 127); digitalWrite(dir1PinB, HIGH); digitalWrite(dir2PinB, LOW); analogWrite(speedPinB, 127); delay(2000); // Động cơ lùi digitalWrite(dir1PinA, LOW); digitalWrite(dir2PinA, HIGH); analogWrite(speedPinA, 127); digitalWrite(dir1PinB, LOW); digitalWrite(dir2PinB, HIGH); analogWrite(speedPinB, 127); delay(2000); }Đoạn mã trên cho phép động cơ quay tiến hoặc lùi trong 2 giây bằng cách thay đổi tín hiệu ở các chân
IN. Sử dụng các chân PWM giúp kiểm soát tốc độ qua các giá trị từ0đến255(tương ứng với tốc độ từ 0 đến tối đa). -
Kiểm tra và tinh chỉnh: Sau khi viết code và hoàn tất kết nối, nhấn nút "Start Simulation" trong Tinkercad để chạy mô phỏng. Đảm bảo động cơ quay đúng hướng và tốc độ mong muốn. Nếu cần điều chỉnh, thay đổi giá trị trong hàm
analogWriteđể tăng hoặc giảm tốc độ động cơ.
Thông qua dự án này, bạn có thể nắm vững nguyên lý điều khiển động cơ bằng mạch cầu H của L298N và cách áp dụng trong các mô hình thực tế.

6. Lập Trình Arduino và Điều Khiển Động Cơ với L298N
Trong phần này, chúng ta sẽ tiến hành lập trình để điều khiển động cơ DC bằng module L298N thông qua Arduino. Thao tác này bao gồm điều khiển tốc độ và hướng quay của động cơ bằng cách sử dụng tín hiệu PWM từ Arduino.
- Kết nối phần cứng:
- Module L298N: Kết nối chân
ENAvàENBcủa module với các chân PWM trên Arduino (chân 9 và chân 10). - Động cơ DC: Nối hai động cơ DC vào các cặp chân
OUT1, OUT2vàOUT3, OUT4của module L298N để điều khiển hai động cơ riêng biệt. - Các chân điều khiển: Nối chân
IN1,IN2,IN3, vàIN4của L298N với các chân kỹ thuật số trên Arduino (ví dụ chân 2, 3, 4 và 5) để điều khiển hướng quay của động cơ.
- Module L298N: Kết nối chân
- Lập trình điều khiển:
Sau khi kết nối phần cứng, chúng ta viết mã Arduino để điều khiển tốc độ và hướng quay của động cơ như sau:
#define enA 9 #define enB 10 #define in1 2 #define in2 3 #define in3 4 #define in4 5 void setup() { pinMode(enA, OUTPUT); pinMode(enB, OUTPUT); pinMode(in1, OUTPUT); pinMode(in2, OUTPUT); pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); } void loop() { // Điều khiển động cơ quay tiến digitalWrite(in1, HIGH); digitalWrite(in2, LOW); analogWrite(enA, 200); // Điều chỉnh tốc độ động cơ 1 digitalWrite(in3, HIGH); digitalWrite(in4, LOW); analogWrite(enB, 200); // Điều chỉnh tốc độ động cơ 2 delay(2000); // Điều khiển động cơ quay lùi digitalWrite(in1, LOW); digitalWrite(in2, HIGH); analogWrite(enA, 150); // Tốc độ thấp hơn để quay lùi digitalWrite(in3, LOW); digitalWrite(in4, HIGH); analogWrite(enB, 150); delay(2000); // Dừng động cơ digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); delay(1000); }Trong đoạn mã trên:
analogWrite(enA, 200)vàanalogWrite(enB, 200): điều chỉnh tốc độ của hai động cơ bằng giá trị PWM từ 0 đến 255.- Các chân
in1, in2, in3vàin4kiểm soát hướng quay của động cơ. Bằng cách đổi giá trịHIGHvàLOWgiữa các chân này, chúng ta có thể thay đổi hướng quay của động cơ.
- Kiểm tra và tinh chỉnh:
Sau khi tải chương trình lên Arduino, động cơ sẽ quay theo hai hướng trong khoảng thời gian được đặt. Tùy chỉnh giá trị PWM hoặc thay đổi thời gian
delayđể điều chỉnh tốc độ và thời gian hoạt động của động cơ theo yêu cầu của dự án.
XEM THÊM:
7. Các Dự Án Thực Tế với L298N và Tinkercad
Trong phần này, chúng ta sẽ khám phá một số dự án thực tế sử dụng L298N trong Tinkercad. Các dự án này không chỉ giúp bạn hiểu rõ hơn về cách điều khiển động cơ mà còn cung cấp những ứng dụng sáng tạo trong thực tế.
- Dự án 1: Điều khiển động cơ DC
- Thiết lập mạch kết nối giữa Arduino và L298N để điều khiển động cơ DC.
- Viết code để thay đổi chiều quay và tốc độ của động cơ.
- Dự án 2: H-Bridge cho động cơ bước
- Sử dụng L298N để điều khiển động cơ bước với các bước tiến và lùi chính xác.
- Áp dụng thuật toán để điều chỉnh tốc độ và vị trí của động cơ.
- Dự án 3: Robot di động
- Kết hợp L298N để xây dựng robot di động có khả năng điều hướng và tránh chướng ngại vật.
- Phát triển mã nguồn để robot có thể hoạt động tự động hoặc điều khiển từ xa.
Những dự án này không chỉ là bài tập thực hành mà còn là cơ hội để bạn sáng tạo và phát triển kỹ năng lập trình cũng như thiết kế mạch điện. Hãy thử nghiệm và khám phá thêm nhiều ý tưởng mới với L298N và Tinkercad!
8. Lợi Ích và Ứng Dụng của Mô phỏng Tinkercad trong Học tập và Thực hành
Tinkercad là một công cụ mô phỏng mạnh mẽ được sử dụng rộng rãi trong giáo dục kỹ thuật và công nghệ. Dưới đây là một số lợi ích và ứng dụng của Tinkercad trong việc học tập và thực hành:
- Dễ dàng tiếp cận:
Tinkercad cho phép người dùng mới bắt đầu làm quen với thiết kế điện tử mà không cần có kiến thức sâu rộng về lập trình hay mạch điện. Giao diện thân thiện và dễ sử dụng giúp học sinh và sinh viên có thể nhanh chóng hiểu rõ các nguyên lý cơ bản.
- Mô phỏng thực tế:
Với khả năng mô phỏng các mạch điện và lập trình vi điều khiển, Tinkercad giúp người học kiểm tra và điều chỉnh thiết kế của mình mà không cần phải sử dụng phần cứng thực tế. Điều này giảm thiểu chi phí và rủi ro trong quá trình học tập.
- Khả năng tùy chỉnh:
Người dùng có thể tạo ra các dự án riêng biệt, từ những mạch điện đơn giản cho đến các ứng dụng phức tạp, như robot hoặc thiết bị tự động hóa. Tinkercad hỗ trợ người học phát triển tư duy sáng tạo và khả năng giải quyết vấn đề.
- Hợp tác và chia sẻ:
Tinkercad cho phép người dùng chia sẻ dự án của mình với bạn bè hoặc giảng viên, từ đó thúc đẩy sự hợp tác trong học tập. Việc nhận phản hồi từ người khác giúp cải thiện kỹ năng và kiến thức của mỗi người.
Với những lợi ích trên, Tinkercad không chỉ là một công cụ học tập hiệu quả mà còn là một nền tảng để người học phát triển kỹ năng công nghệ cần thiết trong thời đại số hóa hiện nay.















 Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender
Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render
Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật
D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả
Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật
VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu
Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả
Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích
Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích "Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng
"Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử
Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp
Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành
Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng
Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024
Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024