Chủ đề 28byj-48 fusion 360: Động cơ bước 28BYJ-48 kết hợp với Fusion 360 là lựa chọn lý tưởng cho các dự án tự động hóa và thiết kế kỹ thuật số. Bài viết này hướng dẫn chi tiết từ cách lắp ráp, lập trình đến các ứng dụng thiết thực của động cơ 28BYJ-48 trong công nghệ. Khám phá các bước kết nối với Arduino, tích hợp với Fusion 360, và tối ưu hóa thiết kế của bạn với công cụ CAD hiện đại.
Mục lục
- Giới thiệu về động cơ bước 28BYJ-48
- Tổng quan về phần mềm Fusion 360 và các ứng dụng CAD trong mô phỏng động cơ
- Hướng dẫn lắp ráp và kết nối động cơ 28BYJ-48 với mạch điều khiển ULN2003
- Lập trình Arduino để điều khiển động cơ 28BYJ-48
- Các dự án ứng dụng động cơ bước 28BYJ-48
- Khắc phục lỗi và các vấn đề thường gặp khi điều khiển 28BYJ-48
- Tài liệu tham khảo và các nguồn học tập thêm
Giới thiệu về động cơ bước 28BYJ-48
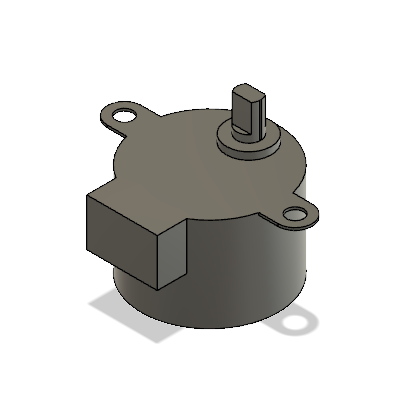
Động cơ bước 28BYJ-48 là một loại động cơ bước nhỏ, phổ biến trong các ứng dụng DIY và thiết bị điều khiển tự động. Với kích thước nhỏ gọn, dễ sử dụng và giá thành thấp, động cơ này thường được kết hợp với mạch điều khiển ULN2003 để dễ dàng tạo ra các chuyển động chính xác và kiểm soát được tốc độ.
Động cơ 28BYJ-48 có thiết kế với 4 cuộn dây và 5 dây dẫn, hoạt động dựa trên nguyên lý chia nhỏ góc quay của trục rotor. Loại động cơ này có các thông số cơ bản như sau:
- Điện áp hoạt động: 5V, phù hợp với các mạch điều khiển đơn giản.
- Góc bước: 5.625 độ mỗi bước, tương ứng với 64 bước cho một vòng quay đầy đủ.
- Giảm tốc: Tỷ lệ giảm tốc 1:64 giúp tăng cường độ chính xác và mô-men xoắn.
Khi sử dụng cùng với phần mềm thiết kế Fusion 360, động cơ này có thể được tích hợp vào nhiều dự án kỹ thuật số khác nhau, chẳng hạn như mô hình 3D cho các cơ cấu điều khiển, máy vẽ, và các dự án tự động hóa nhỏ. Điều này giúp người dùng kiểm tra tính phù hợp về kích thước và động lực học trước khi chế tạo.
| Thông số | Giá trị |
|---|---|
| Điện áp hoạt động | 5V |
| Góc bước | 5.625° |
| Số bước cho một vòng quay | 64 |
| Tỷ lệ giảm tốc | 1:64 |
Nhờ vào tính ổn định và chính xác, động cơ 28BYJ-48 là lựa chọn phổ biến trong việc chế tạo các hệ thống nhỏ, yêu cầu điều khiển chính xác như trong robot học, máy in 3D, hoặc các máy CNC mini. Khả năng kết hợp với các mạch điều khiển và phần mềm thiết kế như Fusion 360 giúp việc thiết kế, mô phỏng, và lắp ráp trở nên thuận tiện hơn.
.png)
Tổng quan về phần mềm Fusion 360 và các ứng dụng CAD trong mô phỏng động cơ
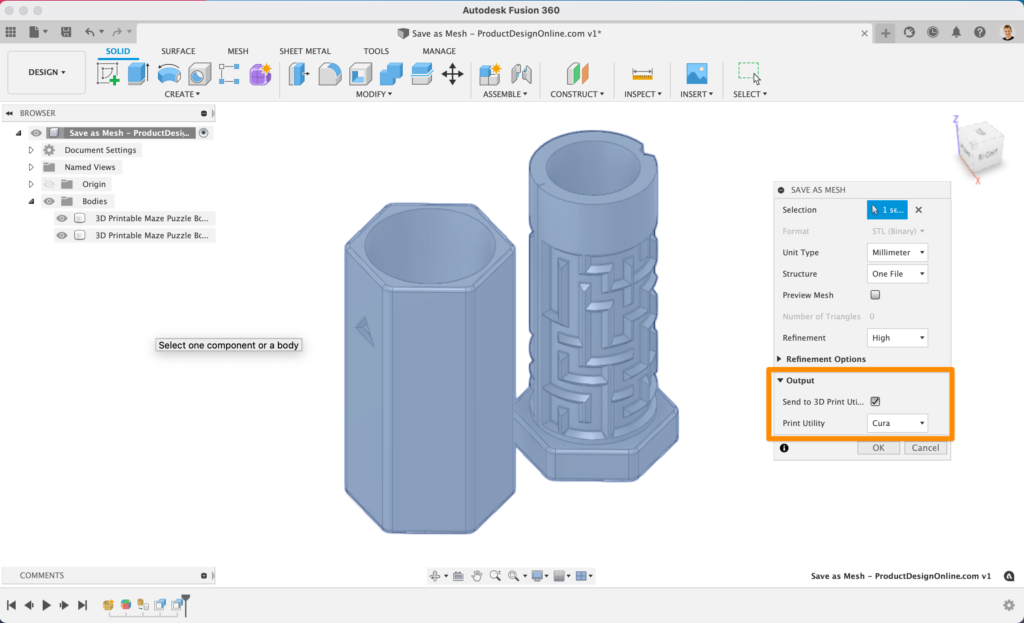
Fusion 360 là phần mềm CAD, CAM, và CAE tích hợp, cung cấp các công cụ mạnh mẽ cho thiết kế, mô phỏng và sản xuất. Với khả năng kết hợp các tính năng 3D CAD và CAM, Fusion 360 cho phép người dùng phát triển và thử nghiệm mô hình một cách toàn diện, từ thiết kế đến sản xuất.
1. Các tính năng chính của Fusion 360 trong thiết kế CAD
- Thiết kế 3D và phác thảo 2D: Fusion 360 cung cấp các công cụ tạo hình cơ bản và nâng cao, giúp người dùng nhanh chóng tạo hình các bộ phận cơ khí từ đơn giản đến phức tạp.
- Mô phỏng và phân tích: Phần mềm cho phép mô phỏng các tải trọng cơ học và phân tích hiệu suất của mô hình, giúp tối ưu hóa trước khi sản xuất.
- Xuất bản vẽ kỹ thuật: Các bản vẽ 2D chi tiết có thể được xuất ra từ mô hình 3D, hỗ trợ việc đo đạc, chú thích và tài liệu hóa chính xác.
2. Ứng dụng Fusion 360 trong mô phỏng động cơ
Fusion 360 hỗ trợ mô phỏng động học, nhiệt độ và ứng suất cho động cơ, cho phép người dùng kiểm tra tính tương thích và hiệu quả của thiết kế. Đặc biệt, các công cụ mô phỏng này giúp dự đoán chuyển động, đo lường tác động cơ học của động cơ 28BYJ-48 trong các cấu hình khác nhau.
3. Tính năng CAM và hỗ trợ sản xuất
Fusion 360 tích hợp các công cụ CAM để lập trình gia công CNC, tối ưu hóa cho các loại máy khác nhau. Việc này rất hữu ích trong sản xuất động cơ khi cho phép kiểm soát quy trình và đảm bảo tính chính xác trong gia công các bộ phận phức tạp.
4. Lợi ích của Fusion 360 cho mô hình hóa và mô phỏng động cơ
- Tiết kiệm thời gian và chi phí: Bằng cách phát hiện lỗi thiết kế và tối ưu hóa sớm, Fusion 360 giúp giảm thiểu thời gian và chi phí sản xuất.
- Nâng cao hiệu suất: Các công cụ phân tích trong Fusion 360 giúp đảm bảo rằng động cơ hoạt động ổn định trong các điều kiện khắc nghiệt.
- Khả năng cộng tác và chia sẻ: Fusion 360 cung cấp nền tảng đám mây để chia sẻ thiết kế, giúp các nhóm làm việc cùng nhau hiệu quả hơn.
Nhờ tích hợp các công cụ CAD và CAM, Fusion 360 là lựa chọn phổ biến cho thiết kế và mô phỏng động cơ, đặc biệt hữu ích khi mô phỏng các động cơ bước như 28BYJ-48 trong các ứng dụng tự động hóa và robot.
Hướng dẫn lắp ráp và kết nối động cơ 28BYJ-48 với mạch điều khiển ULN2003
Động cơ bước 28BYJ-48 là một lựa chọn phổ biến cho các dự án điện tử nhờ chi phí thấp và dễ dàng điều khiển với mạch ULN2003. Dưới đây là hướng dẫn chi tiết từng bước về cách lắp ráp và kết nối động cơ 28BYJ-48 với mạch điều khiển ULN2003:
- Chuẩn bị:
- Một động cơ bước 28BYJ-48.
- Một mạch điều khiển ULN2003.
- Dây nối.
- Nguồn cấp 5V (có thể từ pin hoặc cổng USB).
- Kết nối dây động cơ với mạch ULN2003:
Động cơ 28BYJ-48 có 5 dây (tương ứng với các cuộn dây bên trong), thường có màu sắc khác nhau. Hãy cắm đầu nối của động cơ vào đúng chân trên mạch ULN2003, vì mạch này đã được thiết kế sẵn để tương thích với 28BYJ-48.
- Kết nối mạch ULN2003 với nguồn cấp:
- Kết nối chân VCC (5V) của ULN2003 với nguồn điện 5V.
- Kết nối chân GND của ULN2003 với đất (GND) của nguồn.
- Kết nối mạch ULN2003 với vi điều khiển (như Arduino):
Mạch ULN2003 có 4 chân điều khiển (IN1 đến IN4). Kết nối các chân này với các chân trên vi điều khiển theo thứ tự IN1, IN2, IN3, IN4 để đảm bảo chuỗi bước chính xác. Ví dụ:
Chân ULN2003 Chân Arduino IN1 D2 IN2 D3 IN3 D4 IN4 D5 - Lập trình điều khiển động cơ:
Sử dụng Arduino IDE, bạn có thể viết mã để điều khiển động cơ theo chiều thuận hoặc ngược chiều bằng cách điều chỉnh thứ tự kích hoạt các chân IN trên ULN2003. Ví dụ:
#include
const int stepsPerRevolution = 2048; // Số bước mỗi vòng quay đầy đủ Stepper myStepper(stepsPerRevolution, 2, 3, 4, 5); void setup() { myStepper.setSpeed(10); // Thiết lập tốc độ động cơ } void loop() { myStepper.step(stepsPerRevolution); // Quay 1 vòng delay(1000); myStepper.step(-stepsPerRevolution); // Quay ngược lại 1 vòng delay(1000); } - Kiểm tra và điều chỉnh:
Sau khi nạp mã vào vi điều khiển, động cơ sẽ bắt đầu quay theo các lệnh trong mã. Bạn có thể thay đổi tốc độ hoặc số bước để điều chỉnh động cơ theo nhu cầu.
Với mạch ULN2003 và các bước trên, bạn có thể dễ dàng điều khiển động cơ 28BYJ-48 cho các ứng dụng như robot, tự động hóa, và các dự án DIY khác.

Lập trình Arduino để điều khiển động cơ 28BYJ-48
Để lập trình Arduino điều khiển động cơ bước 28BYJ-48, chúng ta cần sử dụng thư viện Stepper.h giúp đơn giản hóa việc kiểm soát động cơ. Động cơ này kết nối với Arduino thông qua module điều khiển ULN2003.
- Chuẩn bị:
Arduino UnoĐộng cơ bước 28BYJ-48Module ULN2003(kết nối động cơ với Arduino)Thư viện Stepper(được cài sẵn trong Arduino IDE)
- Kết nối các chân:
- Nối
IN1của ULN2003 vớiPin 7của Arduino. - Nối
IN2của ULN2003 vớiPin 6của Arduino. - Nối
IN3của ULN2003 vớiPin 5của Arduino. - Nối
IN4của ULN2003 vớiPin 4của Arduino. - Nối
GNDcủa ULN2003 vớiGNDcủa Arduino. - Nối
VCCcủa ULN2003 với nguồn 5V của Arduino.
- Nối
- Code lập trình: Mở Arduino IDE và dán đoạn mã sau:
#include
const int steps_per_rev = 2048; // Số bước cho mỗi vòng #define IN1 7 #define IN2 6 #define IN3 5 #define IN4 4 Stepper motor(steps_per_rev, IN1, IN3, IN2, IN4); void setup() { motor.setSpeed(10); // Tốc độ 10 vòng/phút Serial.begin(115200); } void loop() { Serial.println("Quay theo chiều kim đồng hồ..."); motor.step(steps_per_rev); // Quay một vòng delay(1000); Serial.println("Quay ngược chiều kim đồng hồ..."); motor.step(-steps_per_rev); // Quay ngược một vòng delay(1000); } - Thư viện
Stepper.hcung cấp các hàm điều khiển cơ bản, vớimotor.step()để điều khiển số bước mỗi vòng. - Cài đặt tốc độ bằng
motor.setSpeed(10), ở đây thiết lập là 10 vòng/phút.
- Thư viện
- Kiểm tra và tải mã lên Arduino:
- Chọn đúng bo mạch và cổng COM trong Arduino IDE.
- Upload mã và mở Serial Monitor để theo dõi trạng thái xoay của động cơ.
Với mã trên, động cơ 28BYJ-48 sẽ quay một vòng theo chiều kim đồng hồ và ngược lại. Quá trình này giúp bạn dễ dàng điều khiển động cơ và ứng dụng vào các dự án khác nhau.
Các dự án ứng dụng động cơ bước 28BYJ-48
Động cơ bước 28BYJ-48 được sử dụng phổ biến trong nhiều dự án DIY nhờ vào chi phí thấp, dễ dàng sử dụng với Arduino và có thể điều khiển chính xác vị trí. Dưới đây là một số dự án thú vị ứng dụng động cơ này trong các lĩnh vực từ robot đến tự động hóa gia đình.
- Robot điều hướng: Sử dụng động cơ 28BYJ-48 cho các bánh xe của robot mini có thể giúp robot di chuyển theo các hướng xác định. Với kết hợp mạch điều khiển ULN2003 và Arduino, bạn có thể điều khiển chính xác hướng đi của robot bằng cách lập trình các bước xoay cụ thể.
- Cánh tay robot: Động cơ bước này thường được dùng để xoay các khớp của cánh tay robot DIY. Với cánh tay robot đơn giản, bạn có thể lập trình động cơ xoay các khớp để thực hiện các nhiệm vụ nhỏ như gắp và đặt vật.
- Cơ cấu nâng hạ cửa sổ thông minh: Một ứng dụng trong nhà của động cơ 28BYJ-48 là cơ cấu nâng hạ hoặc xoay cửa sổ, rèm hoặc các cửa tự động khác. Bạn có thể lập trình động cơ để di chuyển theo lịch trình hoặc điều khiển từ xa bằng cảm biến ánh sáng hoặc cảm biến nhiệt độ để tối ưu hóa ánh sáng và thông gió.
- Điều khiển van nước: Động cơ bước 28BYJ-48 có thể điều khiển van nước mở hoặc đóng trong hệ thống tưới tự động. Kết hợp với cảm biến độ ẩm hoặc cảm biến mưa, hệ thống sẽ giúp tiết kiệm nước và cung cấp độ ẩm chính xác cho cây trồng.
- Điều khiển gương thiên văn: Đối với các dự án thiên văn học DIY, động cơ bước 28BYJ-48 thường được sử dụng để xoay gương thiên văn một cách chính xác nhằm theo dõi các đối tượng trên bầu trời.
Mỗi ứng dụng đều yêu cầu một số kỹ năng lập trình Arduino cơ bản và khả năng kết nối linh kiện điện tử. Các thư viện như Stepper hoặc AccelStepper có thể giúp bạn dễ dàng điều khiển tốc độ và hướng xoay của động cơ, phù hợp với yêu cầu của từng dự án cụ thể.

Khắc phục lỗi và các vấn đề thường gặp khi điều khiển 28BYJ-48
Trong quá trình điều khiển động cơ bước 28BYJ-48, người dùng thường gặp một số lỗi phổ biến. Dưới đây là các vấn đề thường gặp và cách khắc phục giúp đảm bảo hoạt động ổn định và chính xác cho động cơ.
- Động cơ không quay:
- Kiểm tra lại kết nối giữa động cơ và mạch điều khiển ULN2003 để đảm bảo các chân cắm đã được gắn chắc chắn và đúng vị trí.
- Đảm bảo nguồn điện cung cấp đủ cho động cơ hoạt động (thường là từ 5V đến 12V tùy vào yêu cầu).
- Kiểm tra chương trình Arduino để đảm bảo tín hiệu điều khiển được gửi đúng chu kỳ và thứ tự cho các cuộn dây của động cơ.
- Động cơ quay không đều hoặc giật:
- Kiểm tra và chắc chắn rằng tốc độ được đặt trong chương trình Arduino không quá cao. Tốc độ quá cao có thể khiến động cơ không kịp đáp ứng, dẫn đến hiện tượng giật.
- Xem lại thứ tự điều khiển cuộn dây trong mã chương trình. Thứ tự sai sẽ khiến động cơ bước không đúng, dẫn đến hiện tượng giật hoặc quay không đều.
- Động cơ nóng nhanh:
- Động cơ 28BYJ-48 thường chịu tải ở mức trung bình. Nếu động cơ nóng nhanh, hãy giảm thời gian hoạt động liên tục để tránh làm nóng quá mức.
- Giảm điện áp đầu vào nếu có thể, nhưng vẫn đảm bảo điện áp đáp ứng đủ cho động cơ quay ổn định.
- Động cơ quay ngược chiều mong muốn:
- Thay đổi thứ tự các tín hiệu điều khiển đến cuộn dây từ Arduino để đảo ngược chiều quay.
- Sử dụng hàm
step(-steps)hoặc điều chỉnh các biến điều khiển trong chương trình Arduino để đảo chiều quay.
- Động cơ quay nhưng không đạt độ chính xác:
- Đảm bảo mã điều khiển sử dụng đúng số bước cho một vòng quay (thường là 2048 bước cho 28BYJ-48) để đạt độ chính xác tối ưu.
- Sử dụng thư viện
AccelStepperđể tăng tính linh hoạt và điều chỉnh tốc độ, giúp động cơ đạt độ chính xác cao hơn.
Bằng cách thực hiện các bước khắc phục trên, người dùng có thể hạn chế các lỗi phổ biến và cải thiện hiệu suất của động cơ bước 28BYJ-48 trong các ứng dụng thực tế.
XEM THÊM:
Tài liệu tham khảo và các nguồn học tập thêm
Để tìm hiểu và áp dụng các kỹ thuật liên quan đến động cơ bước 28BYJ-48 và Fusion 360, bạn có thể tham khảo một số tài liệu và nguồn học tập hữu ích dưới đây:
- Sách và bài giảng về động cơ bước: Những tài liệu này giúp bạn hiểu rõ hơn về cách thức hoạt động và ứng dụng của động cơ bước trong các dự án DIY hoặc trong hệ thống điều khiển tự động. Các sách như "The Stepper Motor Handbook" có thể cung cấp thông tin chi tiết.
- Hướng dẫn trực tuyến trên các nền tảng học tập: Các website như Arduino, Instructables hay Hackster.io cung cấp nhiều dự án và bài học về cách điều khiển động cơ bước 28BYJ-48 bằng vi điều khiển như Arduino. Đây là những nguồn tài liệu phong phú giúp bạn thực hành với các chương trình mã nguồn mở.
- Fusion 360 Tutorial: Autodesk cung cấp rất nhiều hướng dẫn miễn phí và tài liệu học tập cho phần mềm Fusion 360. Đây là công cụ tuyệt vời để thiết kế mô phỏng động cơ và các cơ cấu cơ học khác. Bạn có thể tham khảo từ trang chủ Autodesk hoặc YouTube để tìm các bài học về việc sử dụng Fusion 360 trong mô phỏng và thiết kế cơ khí.
- Thư viện lập trình Arduino: Thư viện Stepper.h trong Arduino IDE cung cấp các lệnh đơn giản để điều khiển động cơ bước, giúp bạn lập trình và kiểm soát động cơ một cách dễ dàng. Tài liệu trên Arduino Kit hoặc các diễn đàn cộng đồng sẽ giúp bạn nắm bắt các kỹ thuật lập trình cơ bản.
Ngoài ra, các diễn đàn như Arduino Forum, Stack Overflow, và các nhóm học tập trực tuyến trên Facebook hoặc Reddit cũng là những nơi tuyệt vời để trao đổi và học hỏi từ cộng đồng yêu thích công nghệ và cơ điện tử.















 Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender
Blender Room - Cách Tạo Không Gian 3D Tuyệt Đẹp Bằng Blender Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render
Setting V-Ray 5 Cho 3ds Max: Hướng Dẫn Tối Ưu Hiệu Quả Render D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật
D5 Converter 3ds Max: Hướng Dẫn Chi Tiết Và Các Tính Năng Nổi Bật Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả
Xóa Lịch Sử Chrome Trên Máy Tính: Hướng Dẫn Chi Tiết Và Hiệu Quả VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật
VLC Media Player Android: Hướng Dẫn Chi Tiết và Tính Năng Nổi Bật Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu
Chuyển File Canva Sang AI: Hướng Dẫn Nhanh Chóng và Đơn Giản Cho Người Mới Bắt Đầu Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả
Chuyển từ Canva sang PowerPoint - Hướng dẫn chi tiết và hiệu quả Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích
Ghi Âm Zoom Trên Máy Tính: Hướng Dẫn Chi Tiết và Mẹo Hữu Ích "Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng
"Notion có tiếng Việt không?" - Hướng dẫn thiết lập và lợi ích khi sử dụng Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử
Facebook No Ads XDA - Trải Nghiệm Không Quảng Cáo Đáng Thử Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp
Autocad Alert: Giải Pháp Toàn Diện cho Mọi Thông Báo và Lỗi Thường Gặp Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành
Ký Hiệu Trên Bản Vẽ AutoCAD: Hướng Dẫn Toàn Diện và Thực Hành Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng
Tổng hợp lisp phục vụ bóc tách khối lượng xây dựng Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024
Chỉnh kích thước số dim trong cad – cách đơn giản nhất 2024